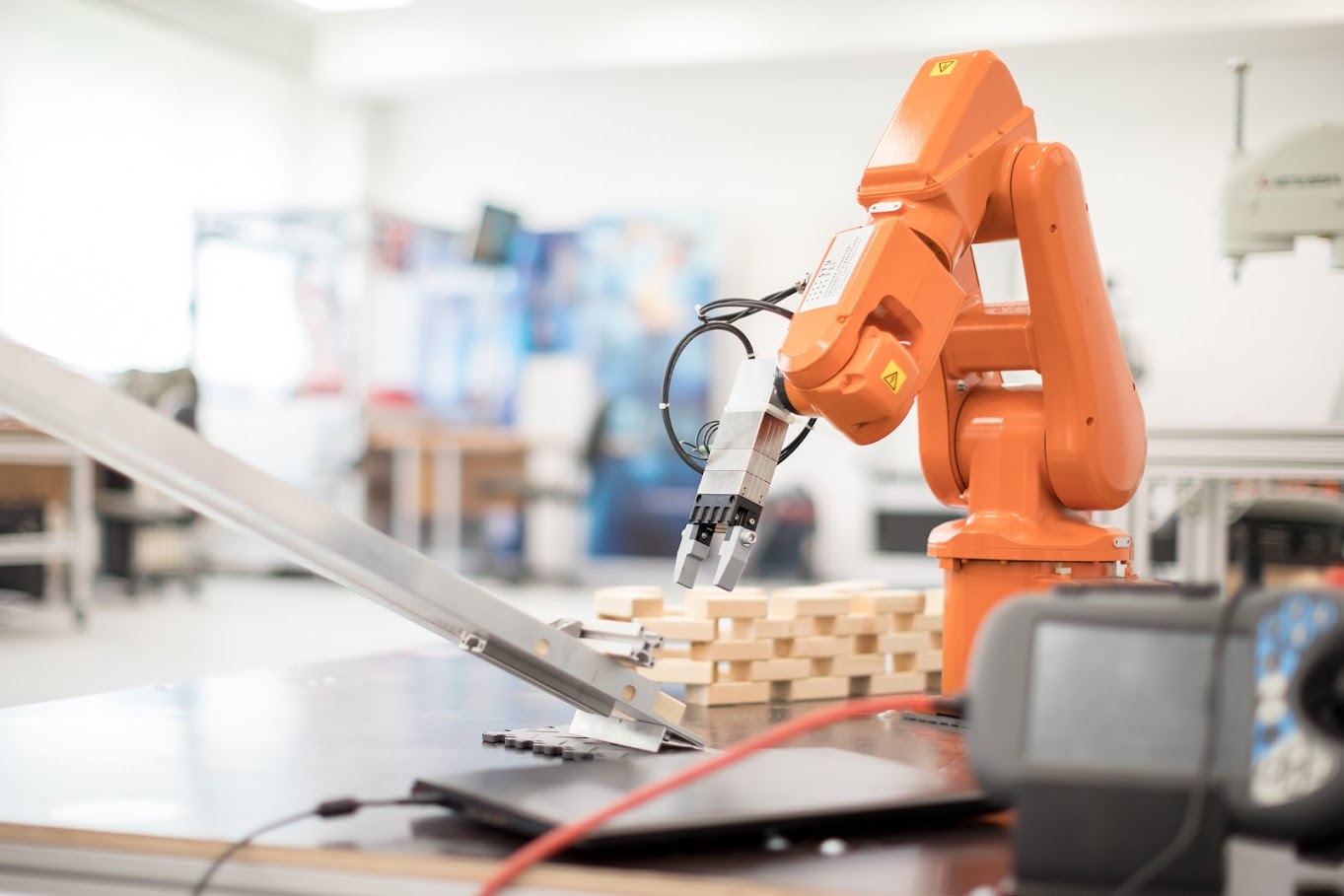
Industrial robots ABB
IRB 4600 and IRB 120
research: visual systems, force control ATI Omega 160 in 6 DOF, automated assembly, professional gripper from SCHUNK company

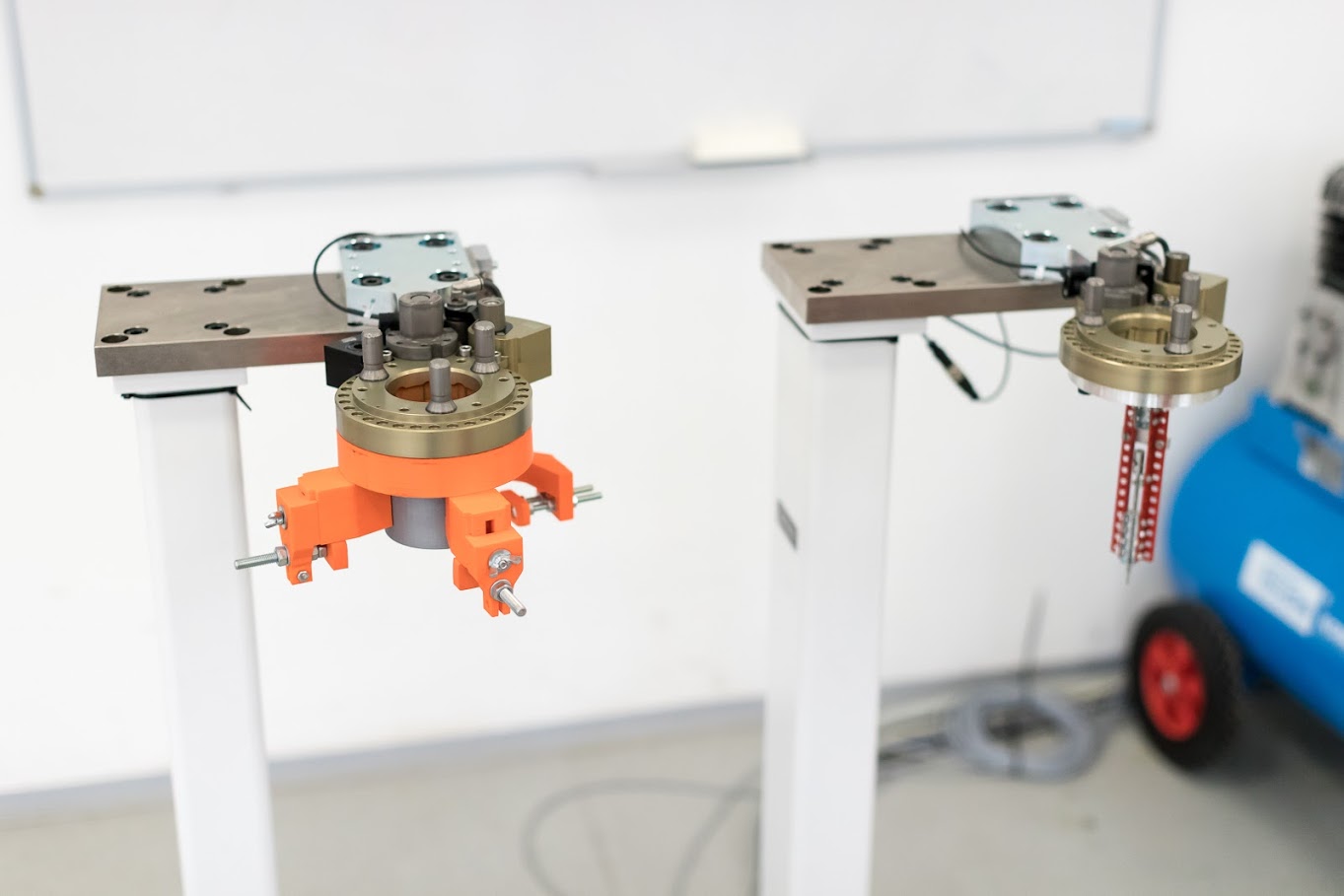
Robotic tool changer MPS630
workplace created in cooperation with company Stäubli
research: effective changing of end effectors, Bernoulli grippers

Light weight robotic manipulator LWA 4P 6KG 6DOF
6 axis robotic arm with maximum payload, equipped with force-torque sensor FTM75 and gripper FWA115; borrowed by company SCHUNK Intec s.r.o.
research: automated assembly, adaptive grasping of objects, control in ROS


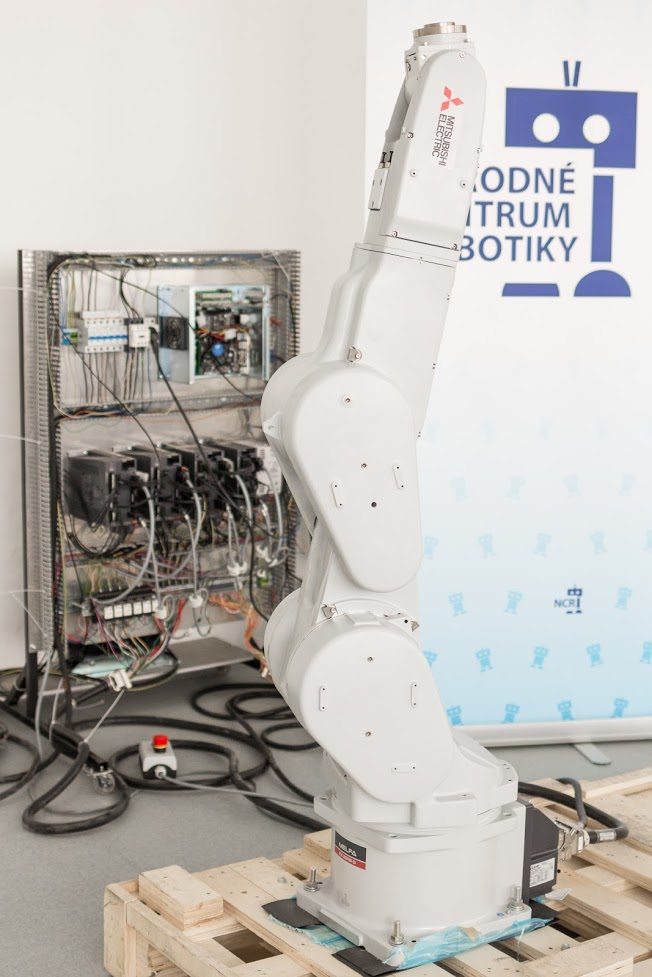
Industrial robot Mitsubishi RV-20FM-D
robotic workplace equipped within the research project Research of technological hubs of CNC cutting machines based on energy beam technologies solved in cooperation with MicroStep spol s.r.o.
research: control in ROS, direct and inverse kinematics

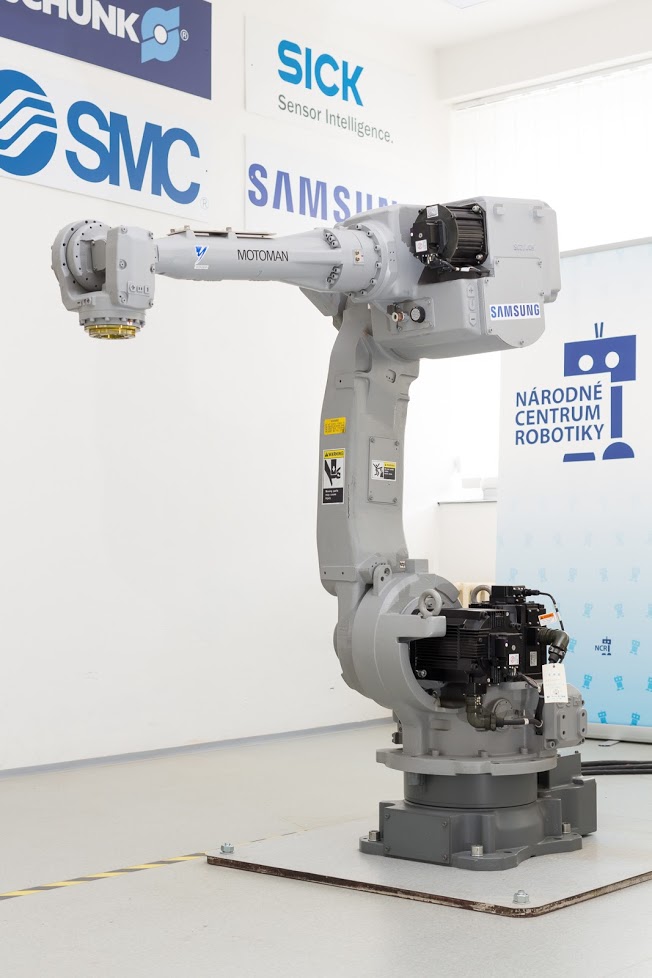
Industrial robot Yaskawa Motoman UP-50N
6 axis robotic arm donated by comapny Samsung Slovakia
research: control of industrial robots
Industrial robot Mitsubishi RH-6SDH
4 axis robotic arm of SCARA type borrowed by company Q-Products a.s.
research: control of fast manipulation with light-weight objects


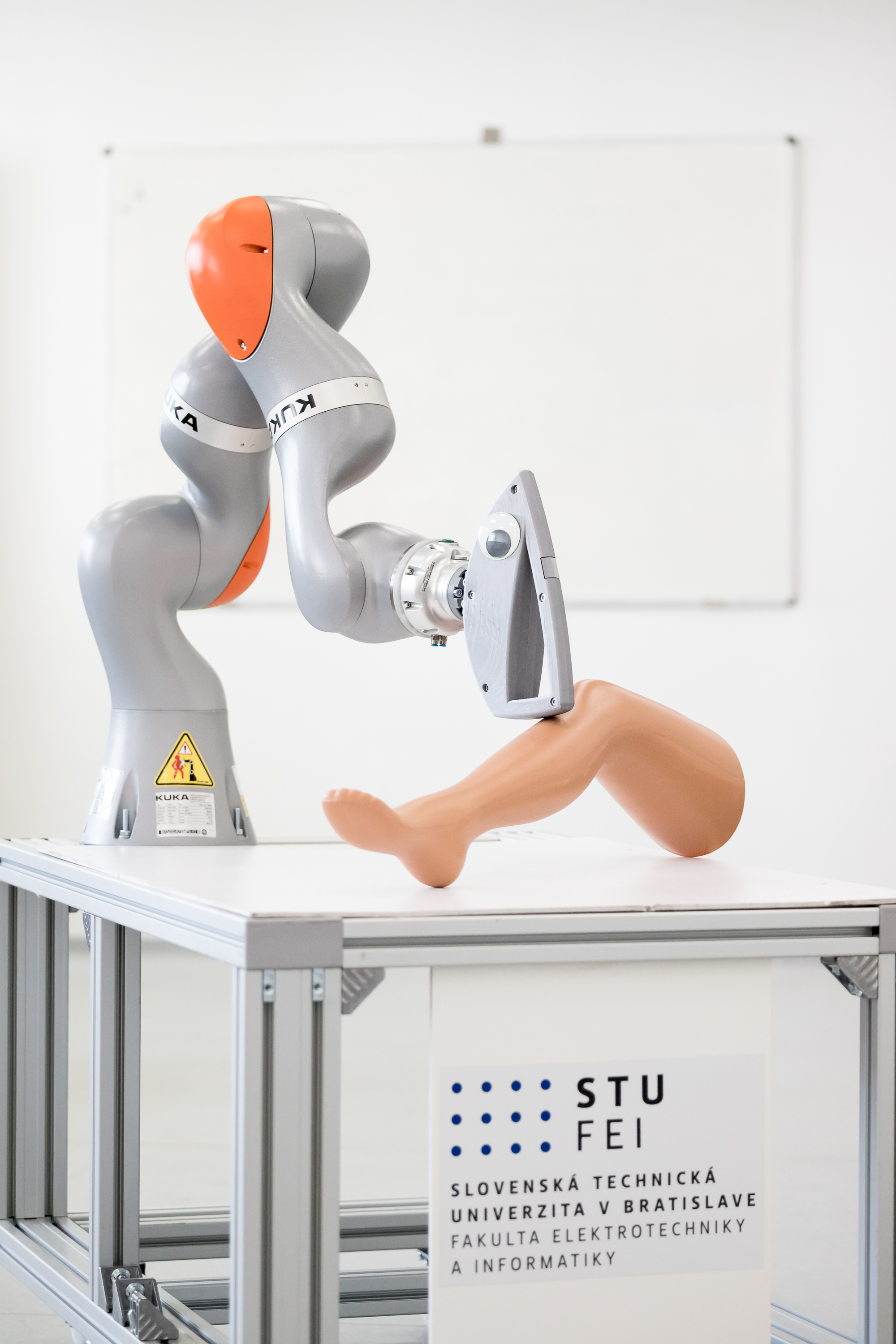
Compliant robot KUKA iiwa 7 R800
7 DOF robotic arm capable of working with humans in the shared workspace
research: project SAHARRA (SemiAutonomous HAir Removal Robotic Assistent)

Compliant robot Universal Robots UR-5
6 DOF robotic arm capable of working with humans in the shared workspace
research: modern multimodal HRI methods (touch, sound, gestures)

Industrial robot Hyundai HX165
6-axis robotic arm as part of a collaboration with KIA Slovakia
research: automated assembly in the automotive industry, high-payload robot, multifunctional gripper for experimental handling of various types of objects


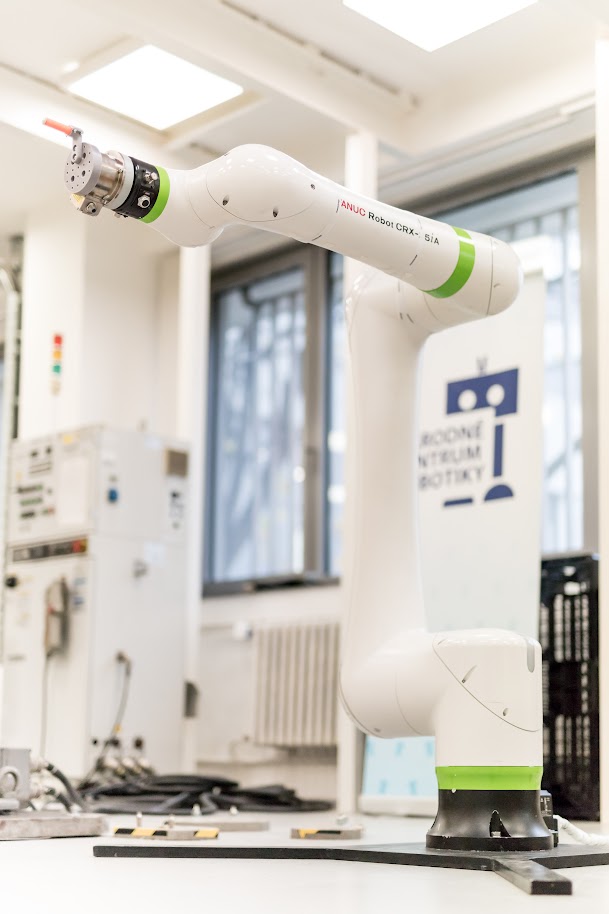
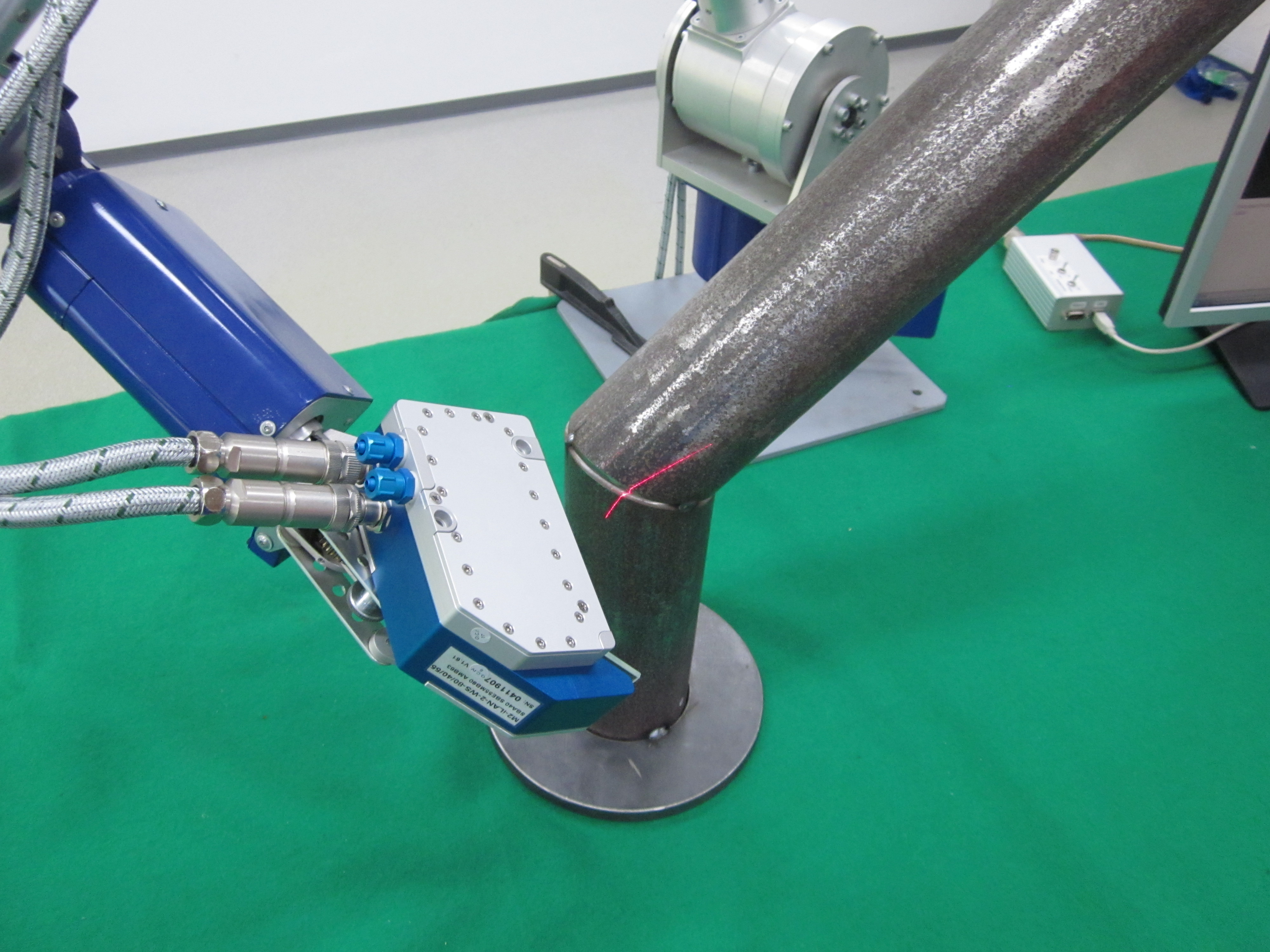
Force-compliant robot FANUC CRX-25i
6-axis robotic arm capable of collaborating with humans in a shared workspace, loaned by the company VÚEZ a.s.
research: automated ultrasonic defectoscopy, force control in all joints, force control in 6 degrees of freedom (6 DOF) using the FTN-Gamma SI-130-10 force and torque sensor, and an ultrasonic probe from the company ATG

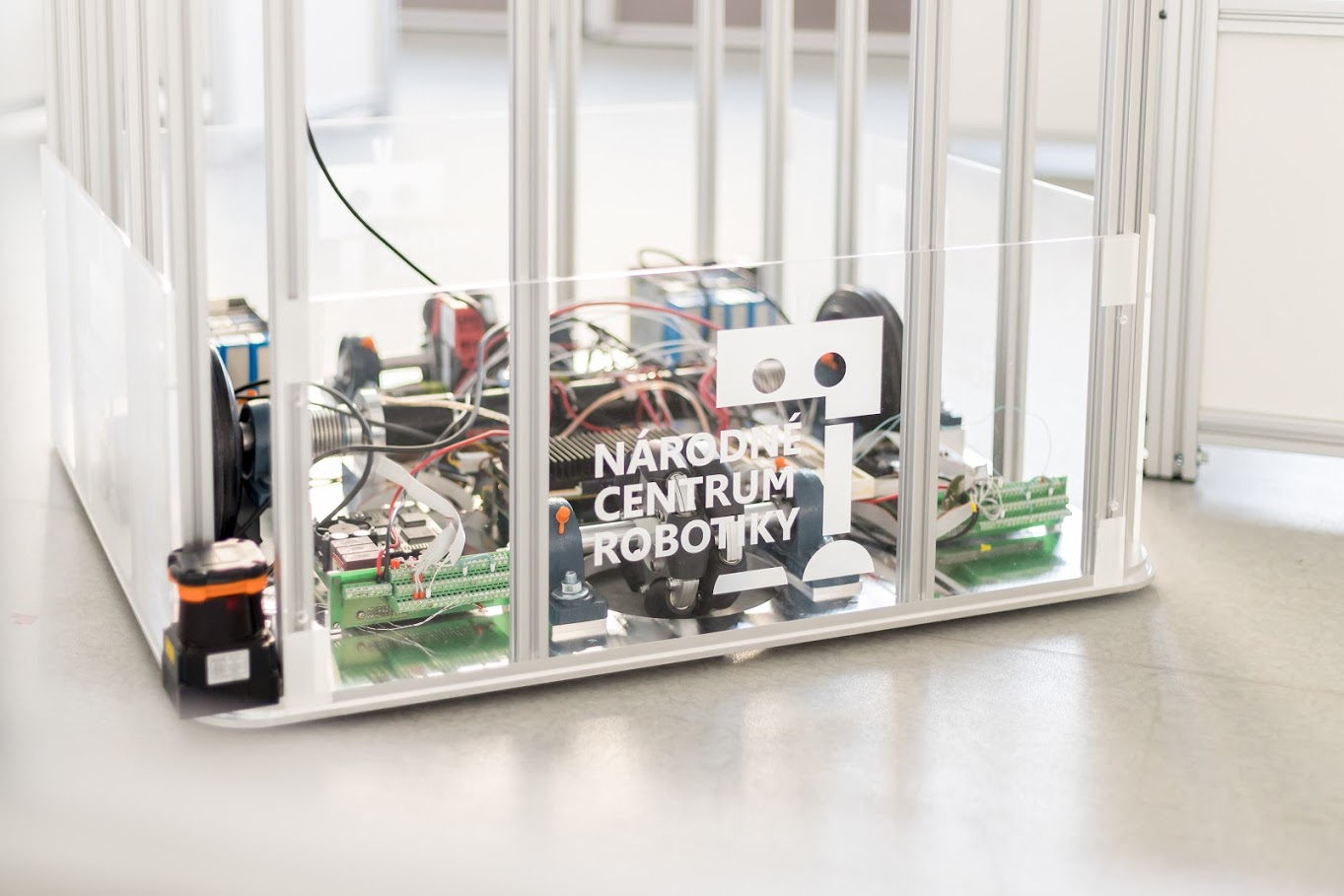
Service robot MRVK
prototype of Slovak service robot created in cooperation with company ZŤS VVÚ Košice
research: mobile manipulation, sensorial systems, manipulator KV-01, control in ROS

Mobile manpilutar Kuka YouBot
robotic device with omni wheels, which was borrowed from company Matador Industries
research: mobile manipulation, control in ROS, teleoperated control


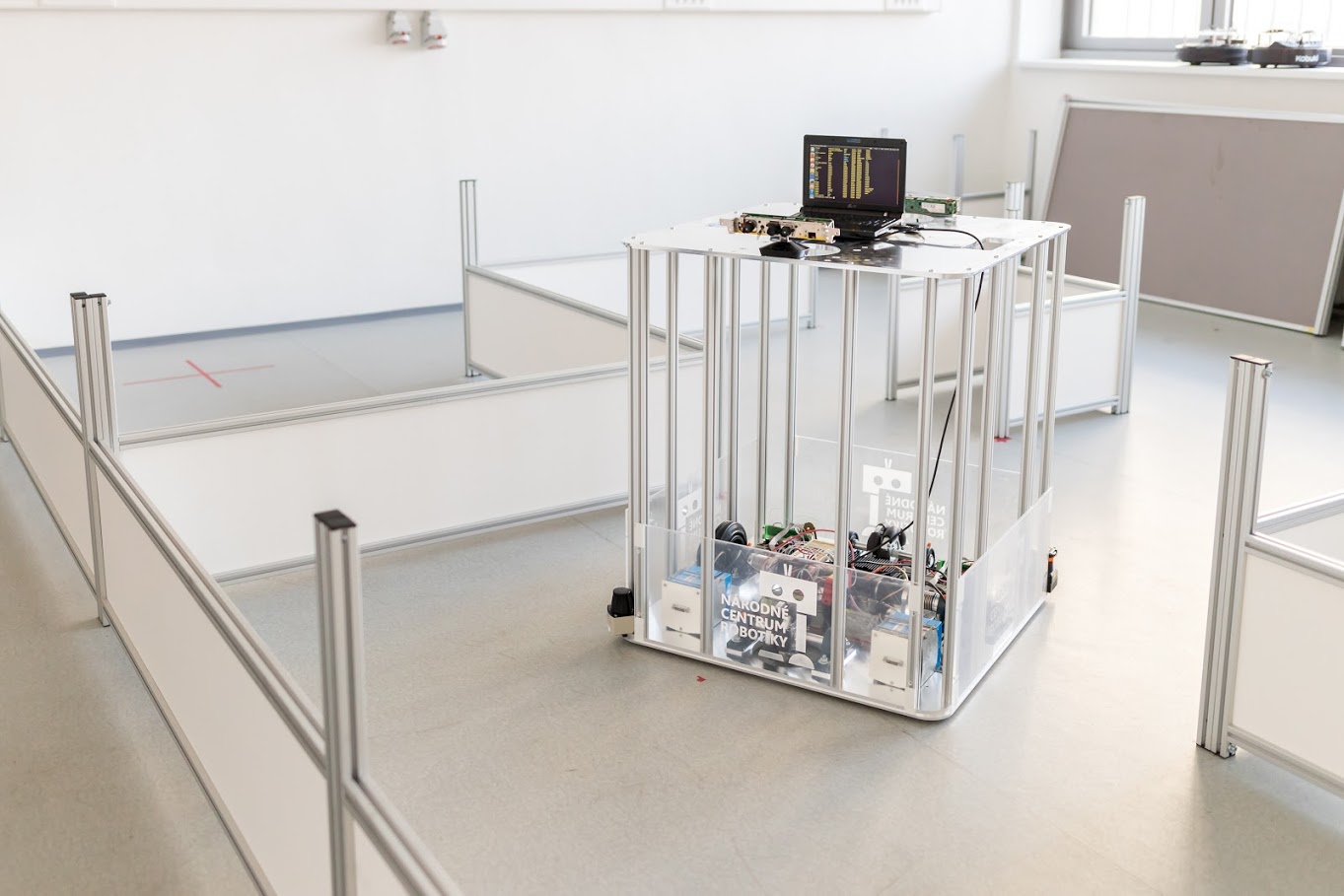
Service robot Black Metal
prototype of service robot for indoor environment created in cooperation with company ATEC s.r.o.
research: SLAM, moving obstacles avoidance, control in ROS
Service robot Rover
prototype of a service robot for the exploration of celestial bodies
research: autonomous control, testing the creation of building materials using solar 3D printing

Walking robot Bioloid GP
walking robot of bipedal type
research: gait analysis, motion analysis of humanoid platform

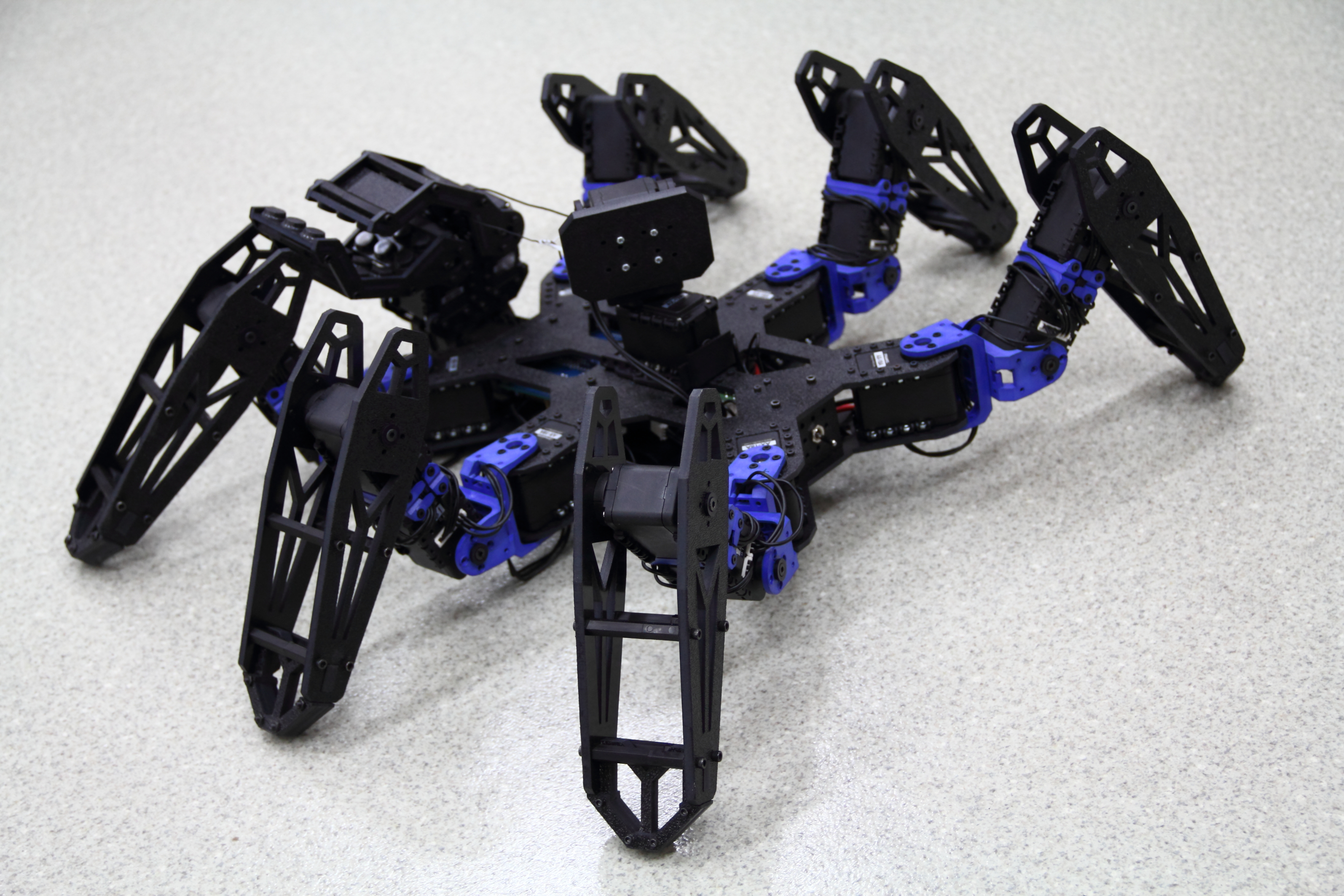
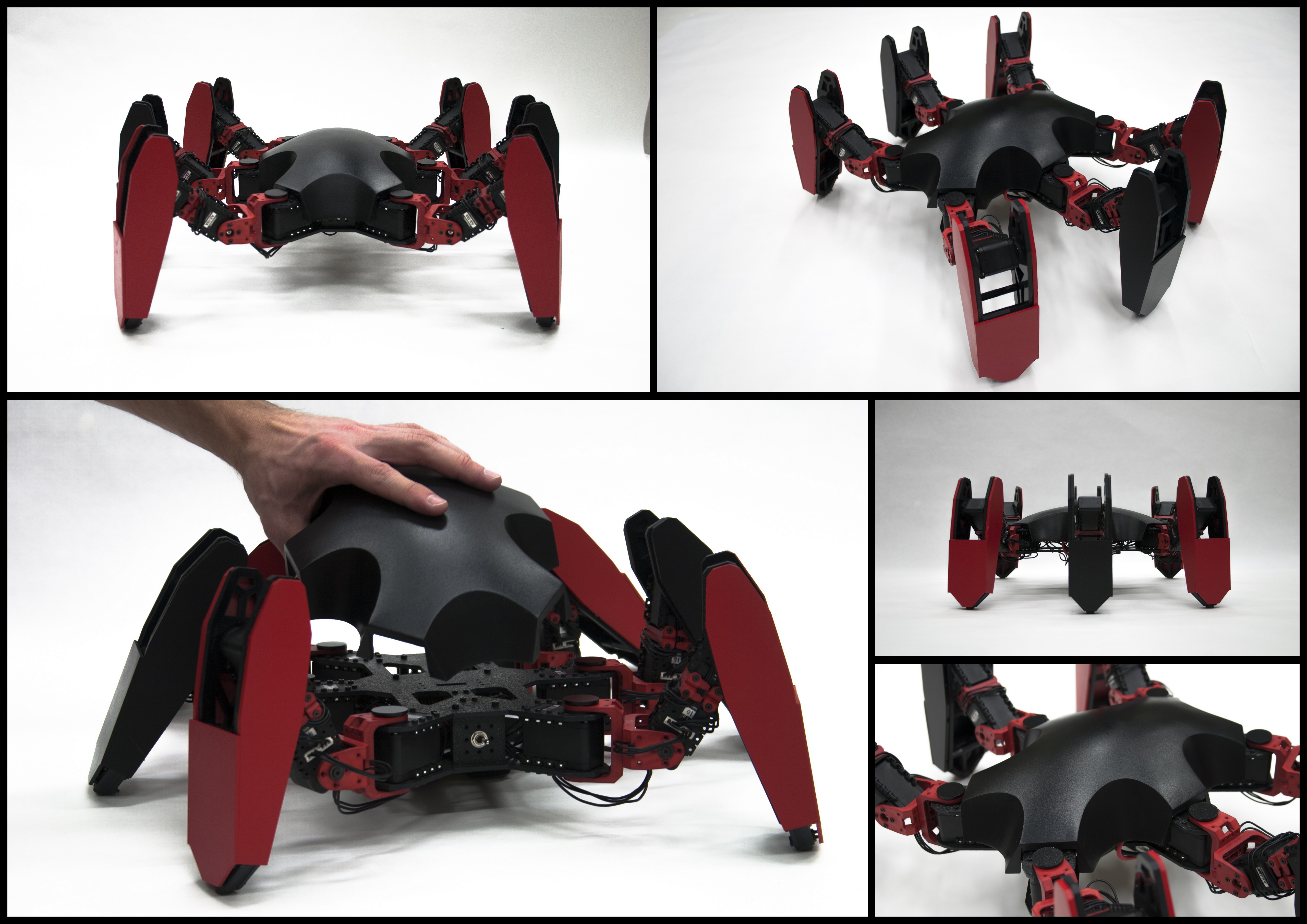
Waling robot Hexapod
walking robot with six legs
research: gait analysis, reliable communication
Humanoid robot NAO
two-legged humanoid robot capable of grasping simple objects
research: adaptive walking, image processing, HRI


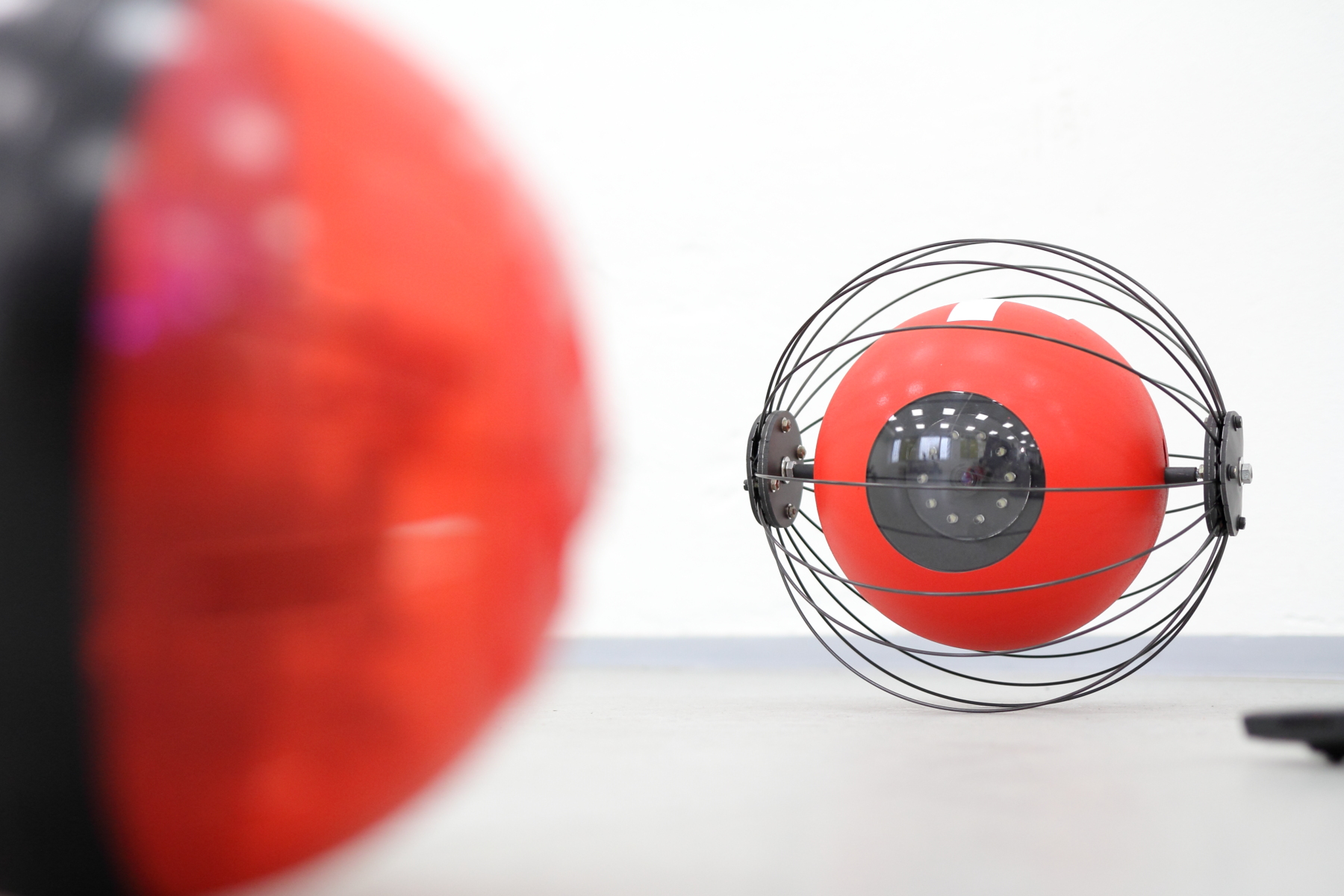
Robot Guľko
prototype of Slovak spherical robot in various versions
research: atypical mechatronic concepts

Robotic drones
various types of flying robots (DJI F440 quadrocopter, DJI F550 hexacopter, DJI F450 quadrocopter, Yuneec Typhoon H Advance)
research: own innovative control, localization and navigation in 6 DOF


Robot of segway type
prototype of Slovak robot of segway-dicycle type
research: IMU unit of own design, innovative filters for data fusion

iRobot Create
9 pieces of development kit for various purposes
research: gesture recognition and control, RGB-D navigation and mapping, mutliagent system for mapping of environment

Kobuki
5 pieces of development kit for various purposes
research: SLAM, navigation, RGB-D maps


CNC milling machines
milling machines Kompas F1100 and customized F600
research: prototyping support


Force-torque sensors
various types of force-torque sensors, e.g. OptoForce HEX-70-CE-2000N
research: force-torque control in 6 DOF, automated assembly


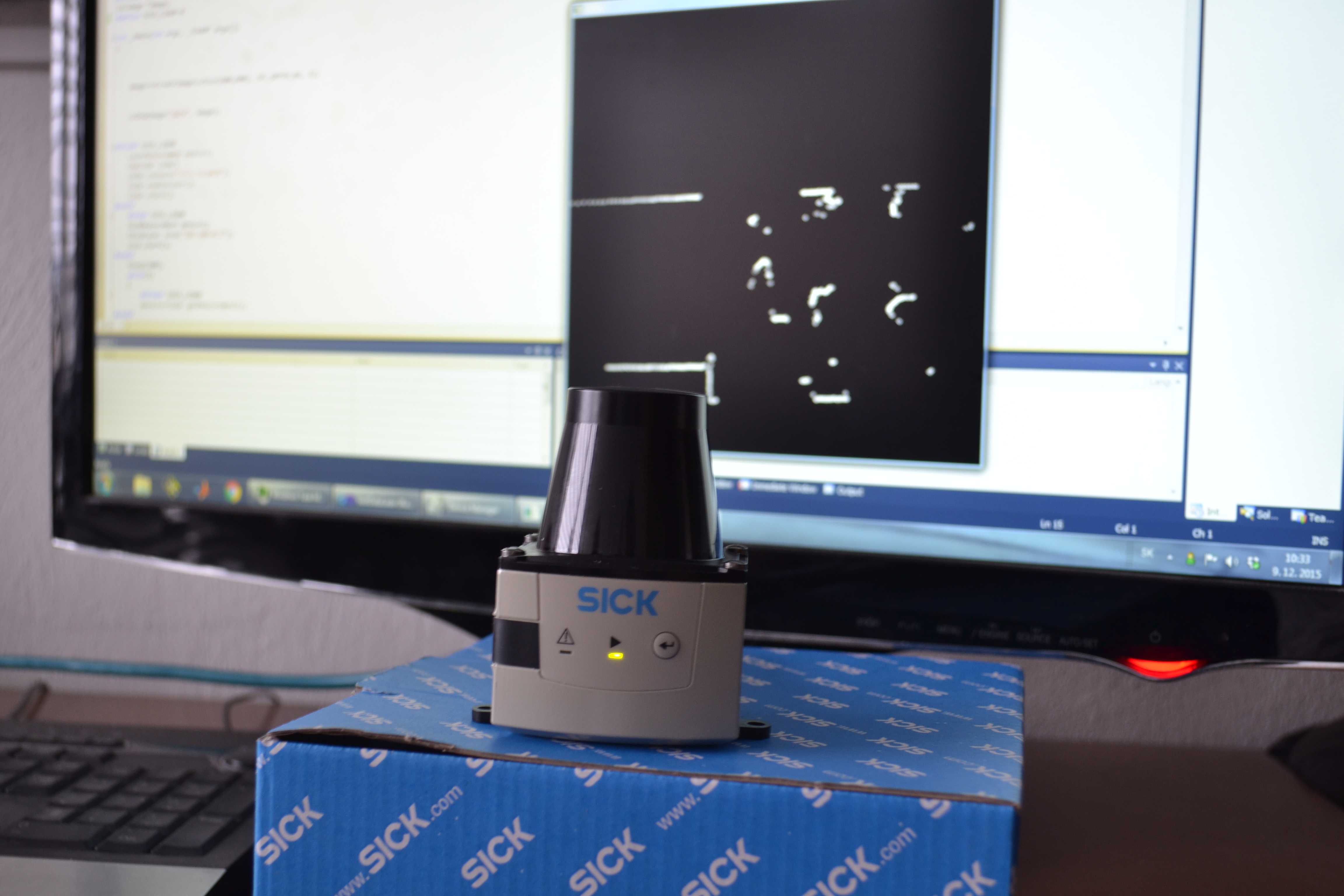
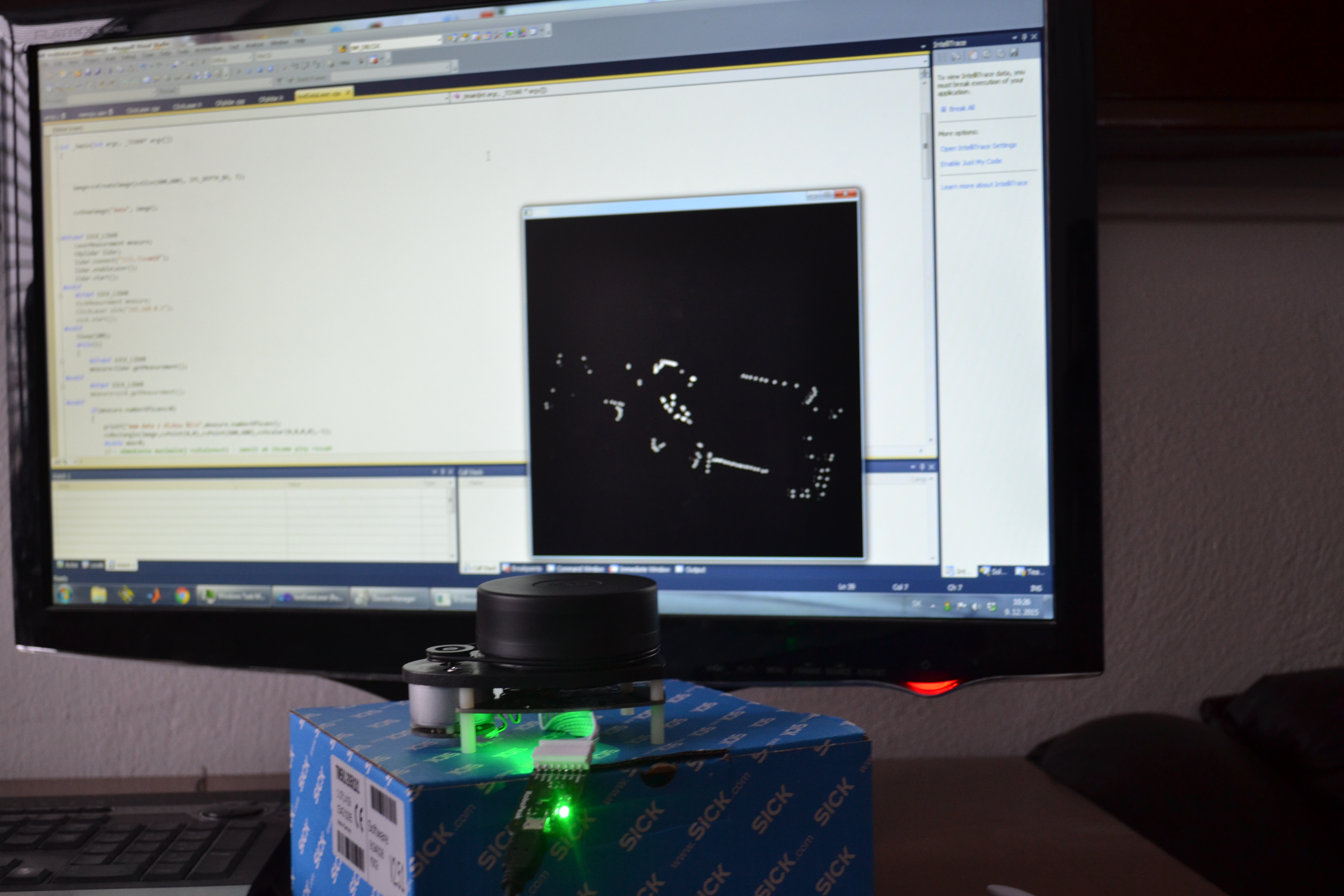
Laser rangefinders
various type of laser rangefinders, e.g. SICK, Hokuyo, M2-iLAN-2, RPLIDAR
research: automated welding, SLAM, motion detecion, navigation

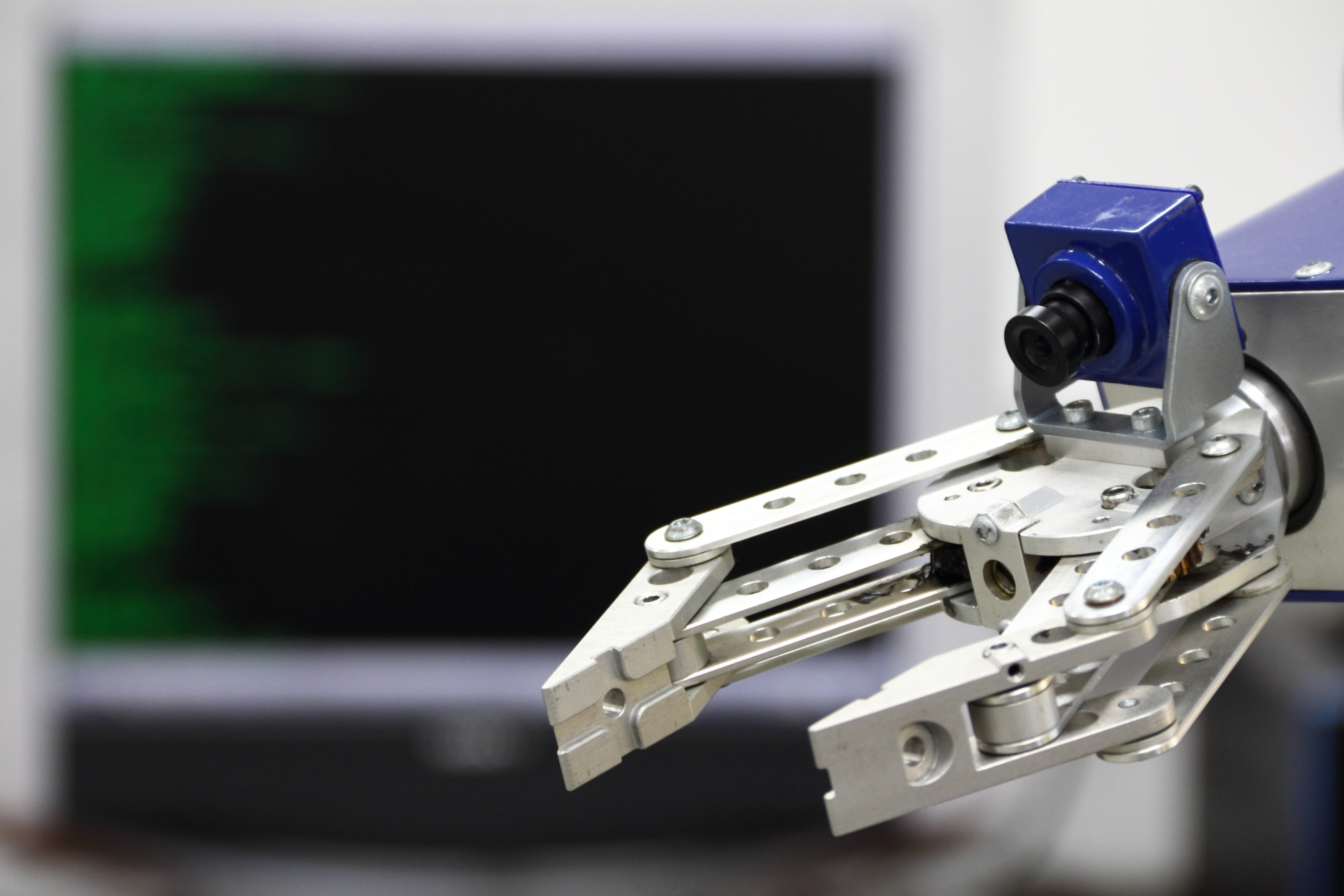
Visual systems
cameras Ximea MC050CG-SY-UB, Kinect Azure, Kinect v2, Intel RealSense D435
research: mapping, terrain traversability, and navigation, HRI, detection of the operator, detection of gestures, biometry, robot control by gestures, objects detection




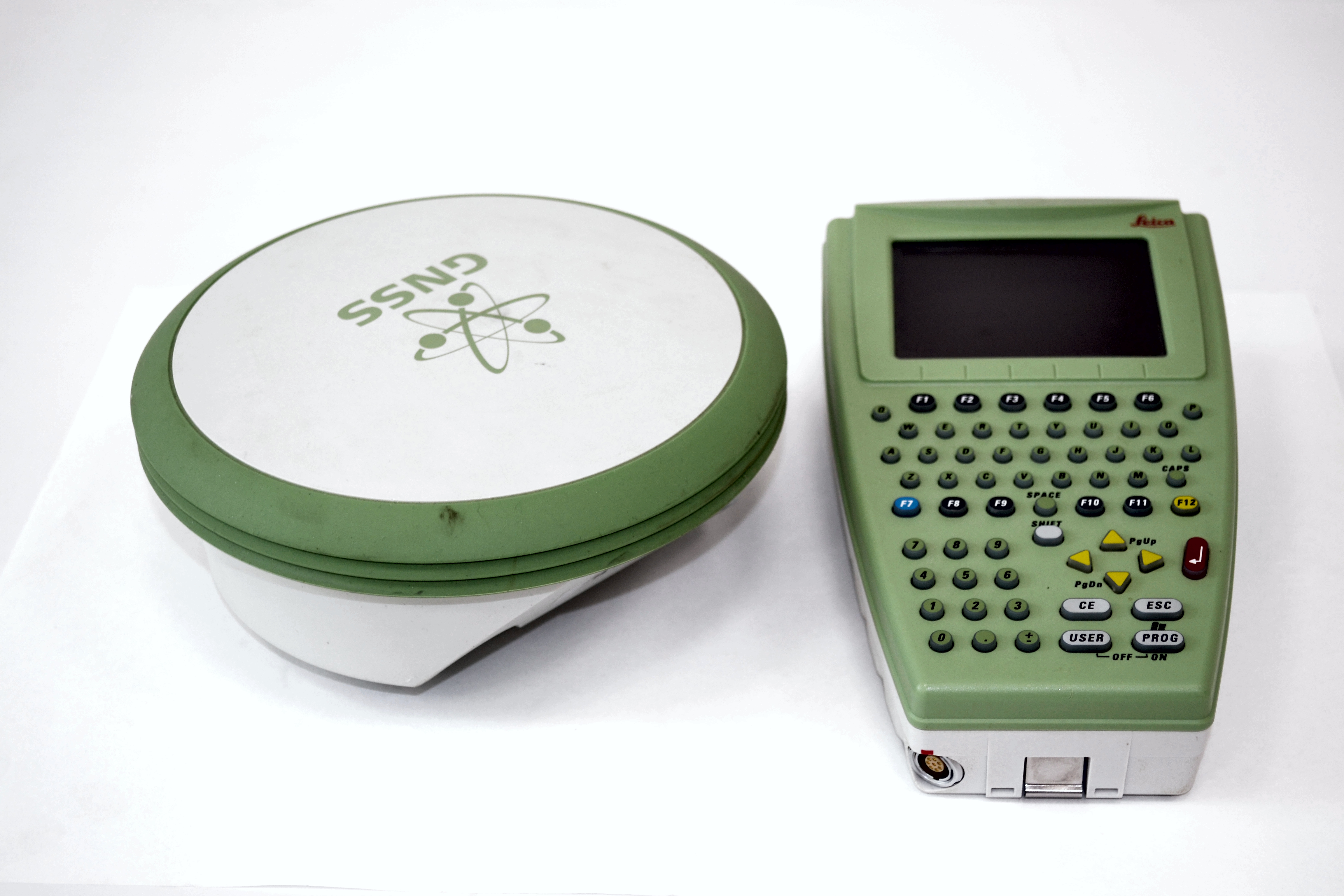
Other sensors
geodetic localization system LEICA 1200+, NovAtel ProPak 6
specific visual systems (thermal imager TIM 160, HDR camera, stereo camera, etc.)
IMU units (MEMS ADIS 16488BMLZ ADIS 16350AMLZ)



NCR je konzorčným partnerom projektu: Expanding Digitalisation of Industry (4.0) in Slovakia – EXPANDI 4.0
Projekt EXPANDI 4.0 je financovaný z prostriedkov programu Digitálna Európa a Plánu obnovy a odolnosti SR.