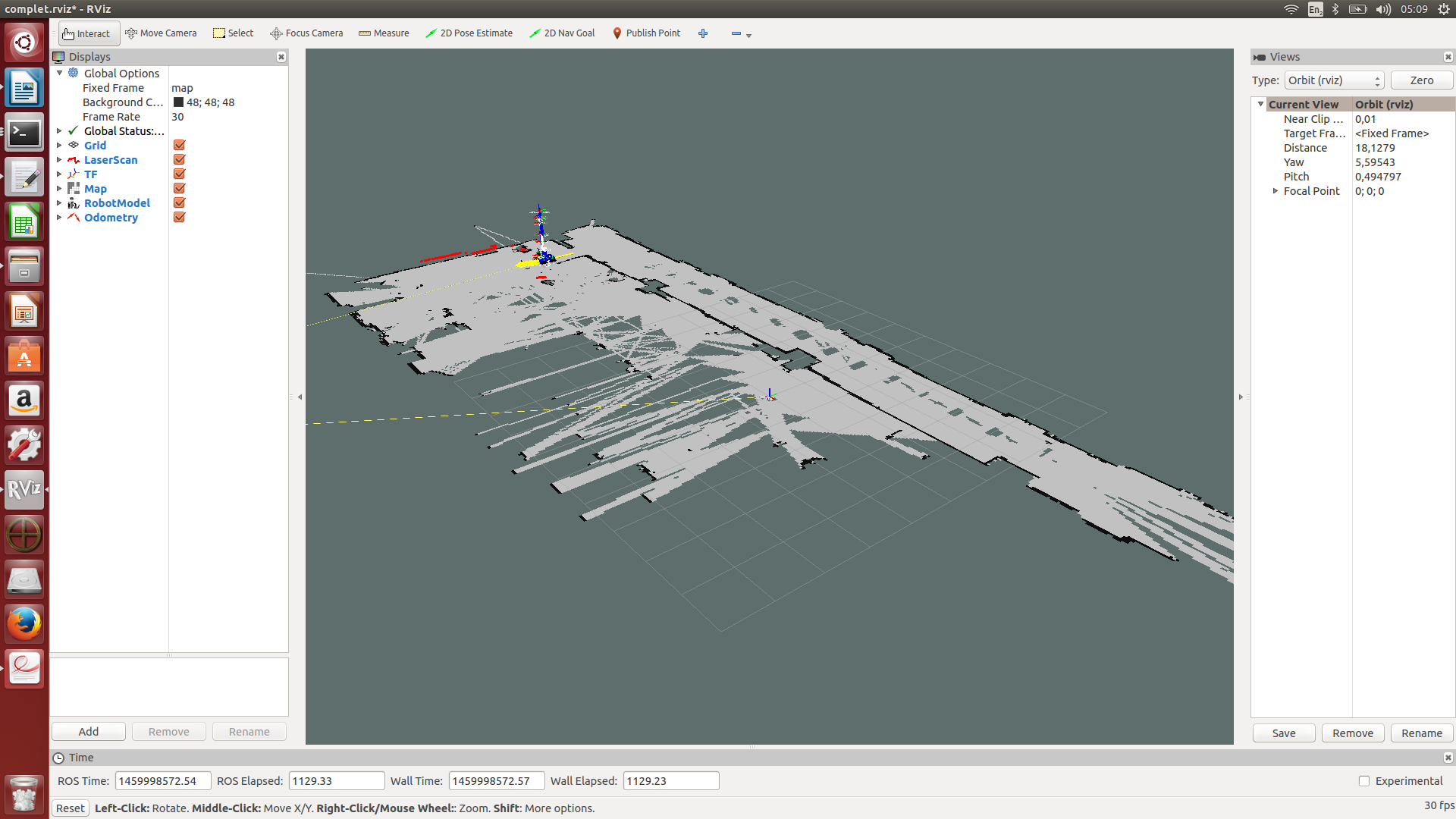
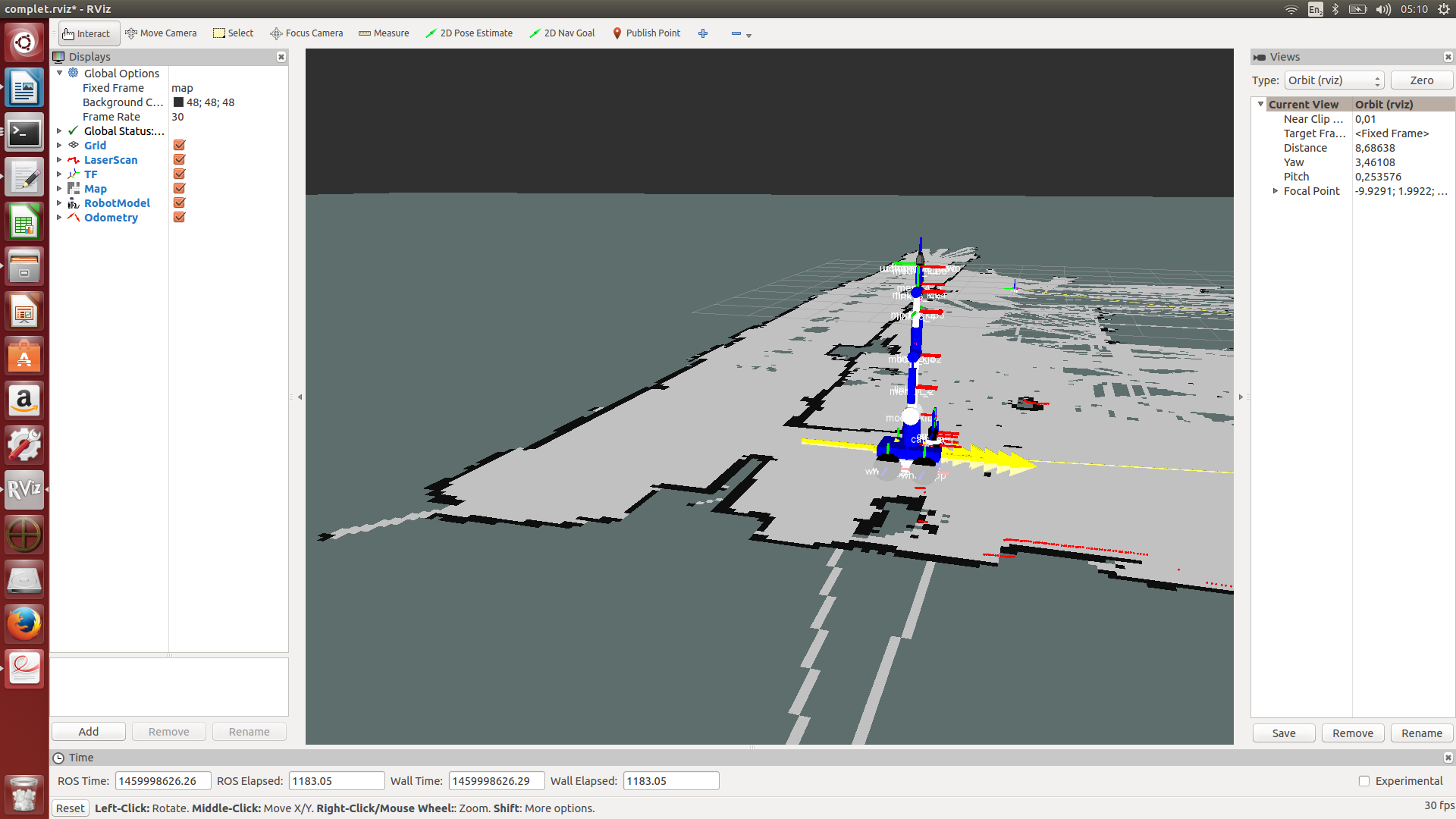
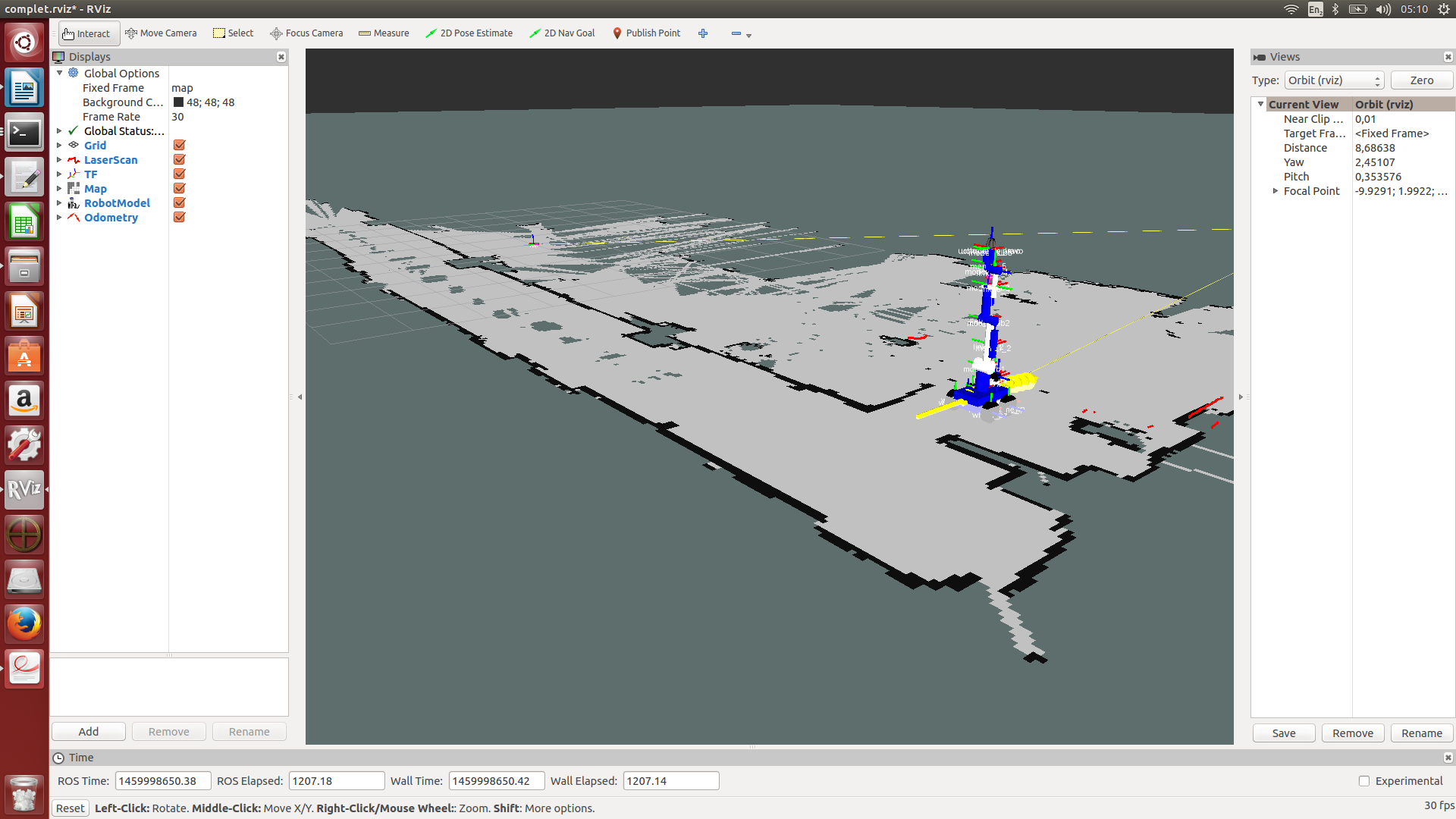
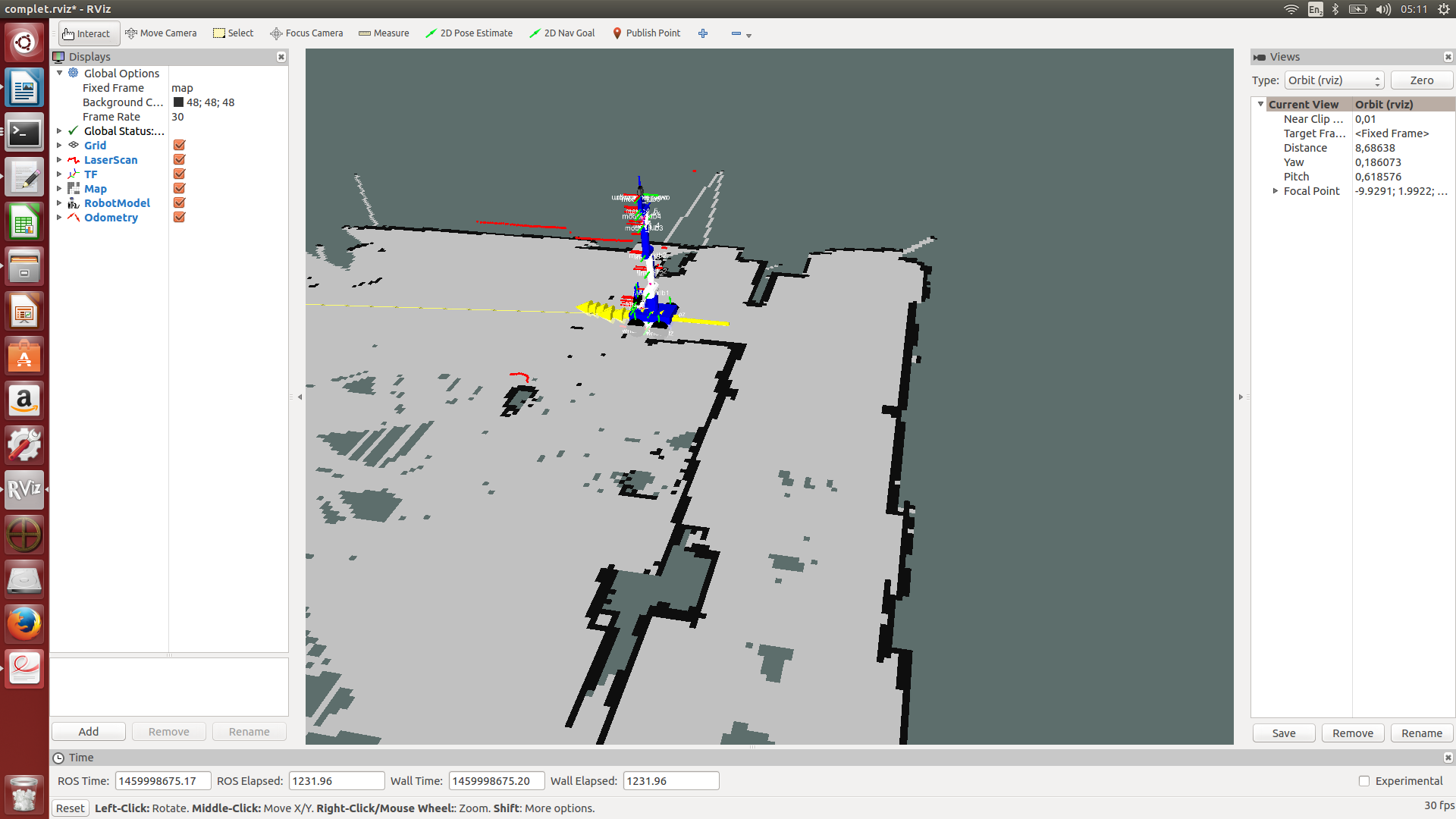
We are one of the first to work in ROS in Slovakia. Below you can see the map of NCR, which was created in ROS. Area was mapped by robot MRVK, which used the package SLAM gmapping. Hokuyo URG-04 LX and odometry were used as sensorial equipment. In the future we plan to expand this activity by the gyroscope Adis16350. In the coming days we will try to map the 6th floor of the D-block at FEI STU. This work was done by Matej Bartošovič, Michal Dobiš and Miroslav Kohút.

Posted in: News
NCR je konzorčným partnerom projektu: Expanding Digitalisation of Industry (4.0) in Slovakia – EXPANDI 4.0
Projekt EXPANDI 4.0 je financovaný z prostriedkov programu Digitálna Európa a Plánu obnovy a odolnosti SR.