Priemyselné roboty ABB
IRB 4600 a IRB 120
výskumné úlohy: vizuálne systémy, riadenie sily v 6 DOF cez snímač ATI Omega 160, automatizovaná montáž, profesionálne chápadlo od firmy Schunk


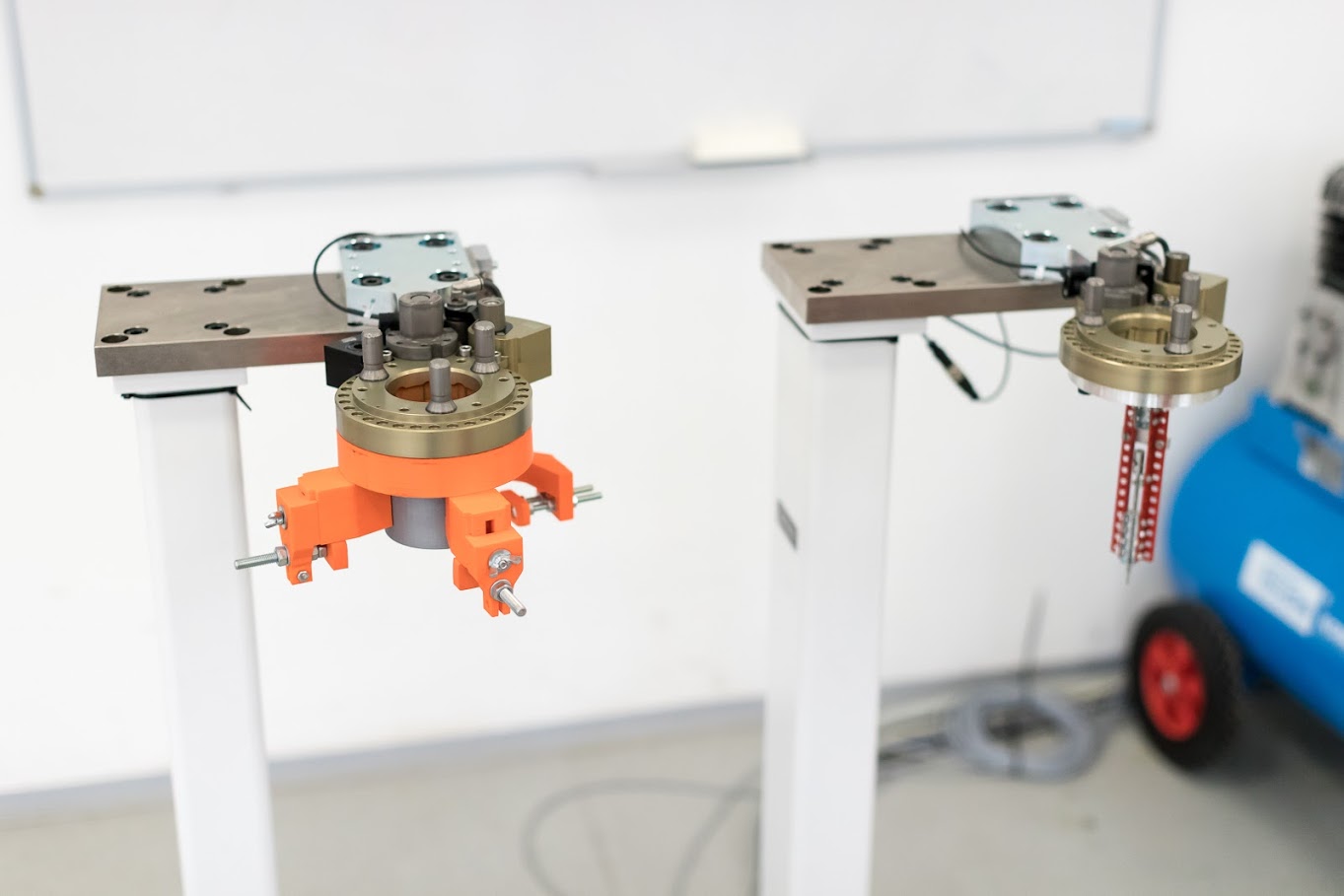
Výmenník nástrojov MPS630
pracovisko vybavené v spolupráci so spoločnosťou Stäubli
výskumné úlohy: efektívna výmenná koncových efektorov, Bernoulliho chápadlá

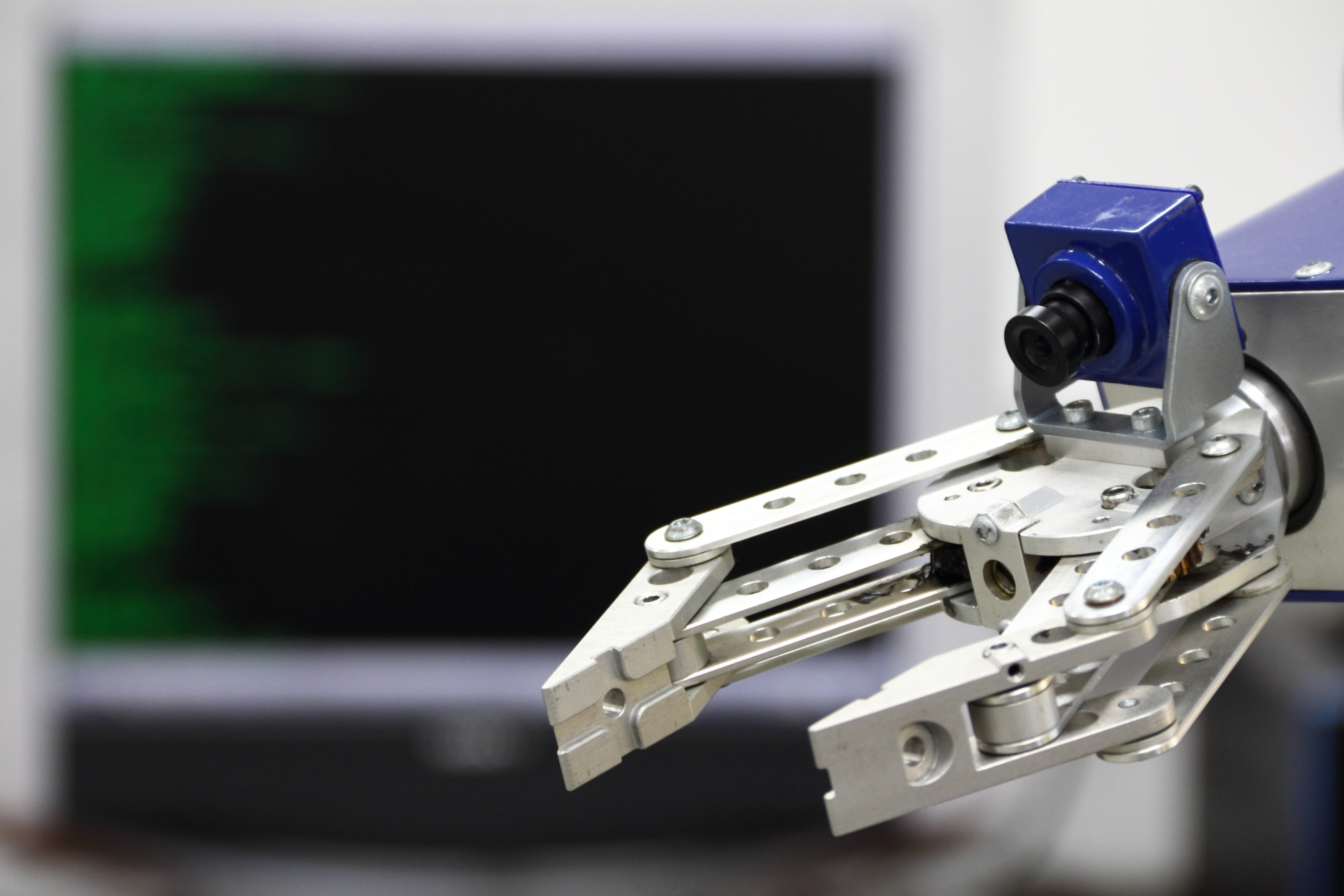
Odľahčený robotický manipulátor LWA 4P 6KG 6DOF
6-osové robotické rameno s maximálnou nosnosťou 6 kg, vybavené silovo-momentovým snímačom FTM75 a uchopovačom FWA115; zapožičané od firmy SCHUNK Intec s.r.o.
výskumné úlohy: automatizovaná montáž, adaptívne uchopovanie predmetov, riadenie v ROS


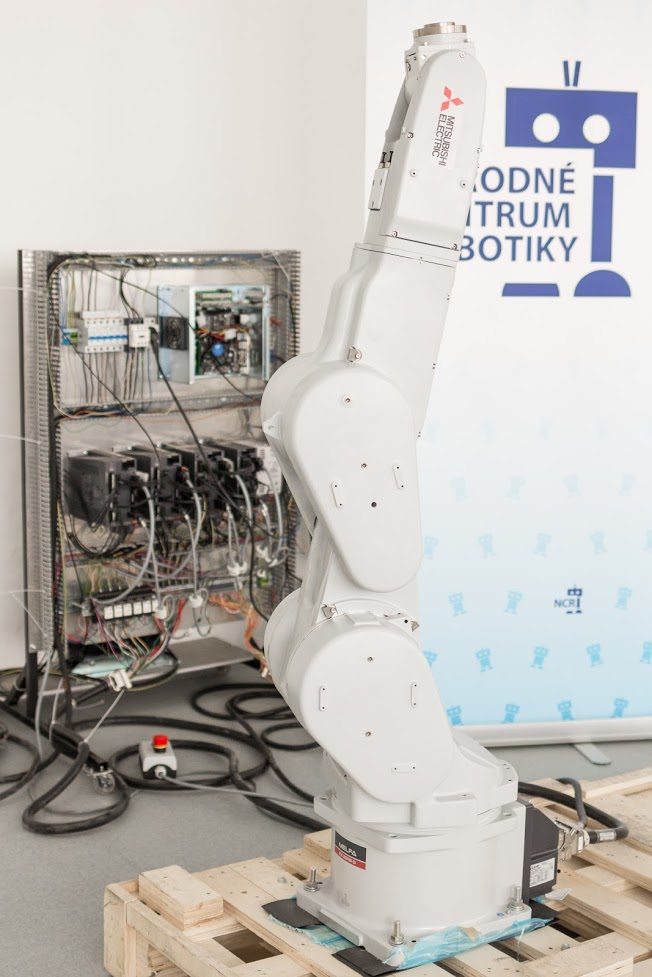
Priemyselný robot Mitsubishi RV-20FM-D
robotizované pracovisko vybavené v rámci výskumného projektu Výskum technologických uzlov CNC strojov na delenie materiálov energolúčovými technológiami v spolupráci s MicroStep spol s.r.o.
výskumné úlohy: riadenie v ROS, priama a inverzná kinematická úloha

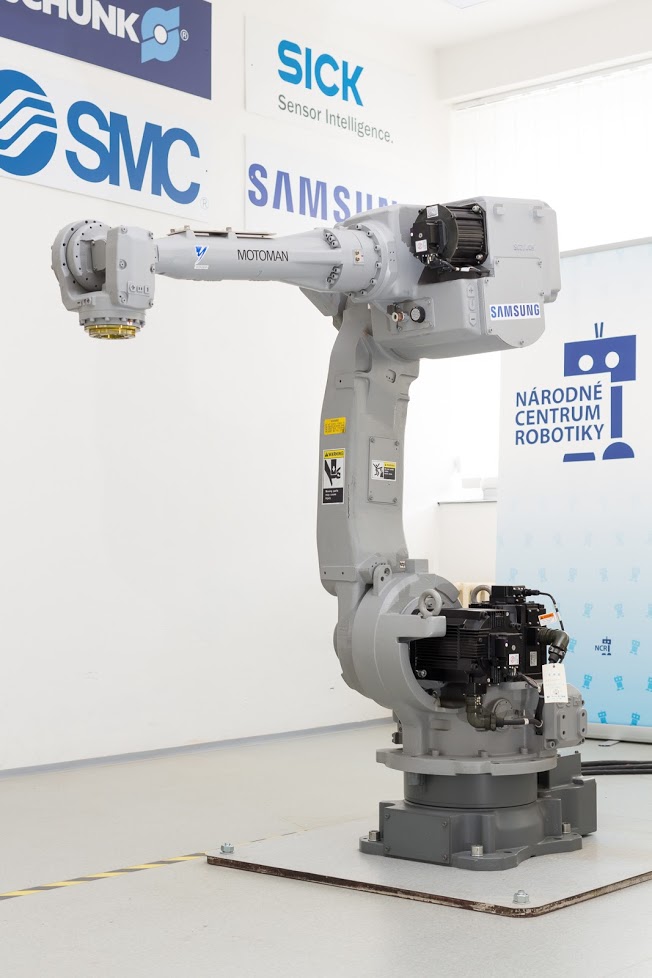
Priemyselný robot Yaskawa Motoman UP-50N
6-osové robotické rameno darované spoločnosťou Samsung Slovakia
výskumné úlohy: riadenie priemyselných robotov
Priemyselný robot Mitsubishi RH-6SDH
4-osové robotické rameno typu SCARA zapožičané spoločnosťou Q-Products a.s.
výskumné úlohy: riadenie rýchlej manipulácie s ľahkými predmetmi


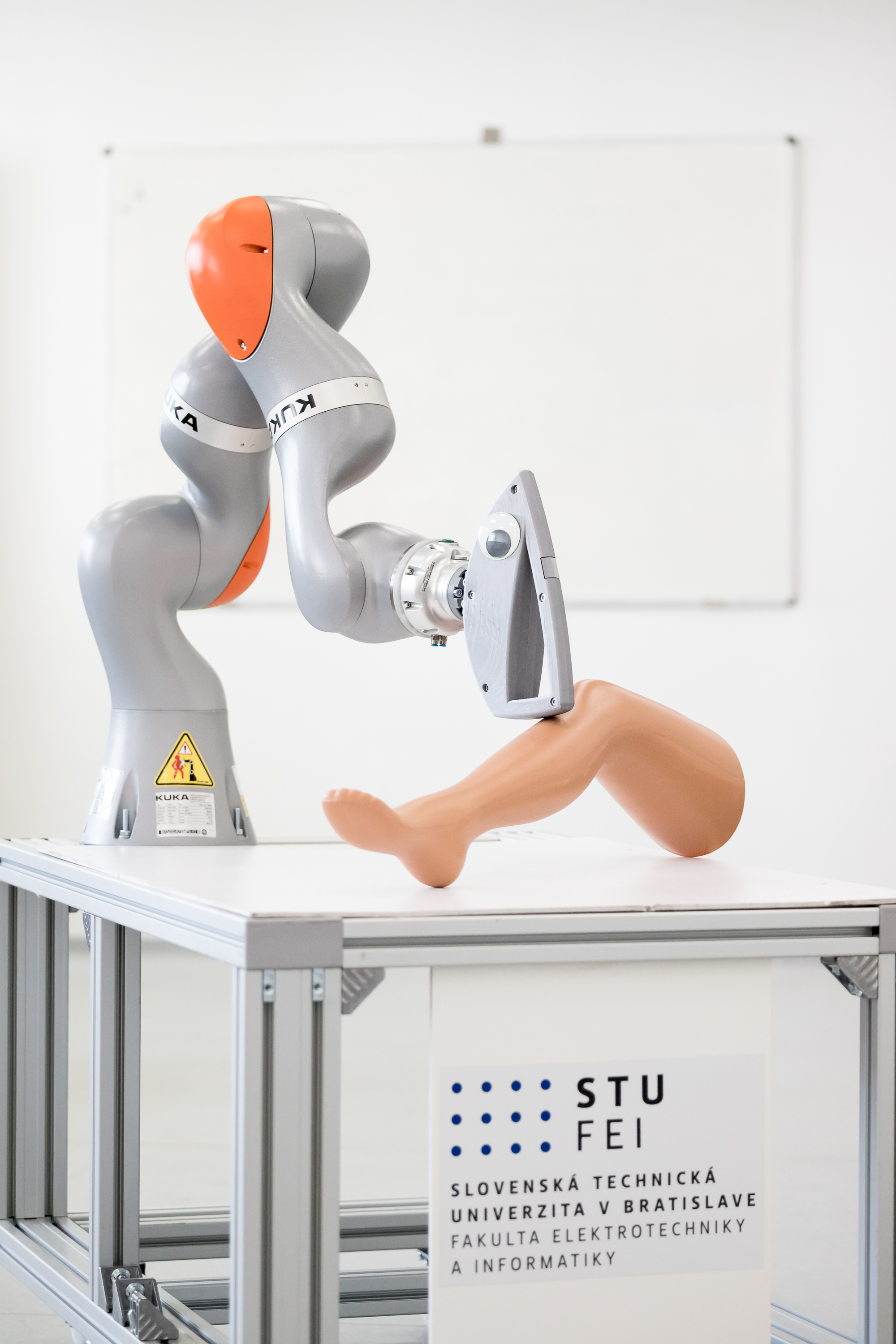
Silovo poddajný robot KUKA iiwa 7 R800
7-osové robotické rameno schopné spolupráce s človekom v jednom zdieľanom priestore
výskumné úlohy: projekt SAHARRA (SemiAutonomous HAir Removal Robotic Assistent)

Silovo poddajný robot Universal Robots UR-5
6-osové robotické rameno schopné spolupráce s človekom v jednom zdieľanom priestore
výskumné úlohy: moderné multimodálne metódy HRI (hmat, zvuk, gestá)

Priemyselný robot Hyundai HX165
6-osové robotické rameno v rámci spolupráce s KIA Slovakia
výskumné úlohy: atomatizovaná montáž v automobilovom priemysle, robot s vysokou nosnosťou, viacúčelový uchopovač pre experimentálne uchopovanie rôznych typov objektov


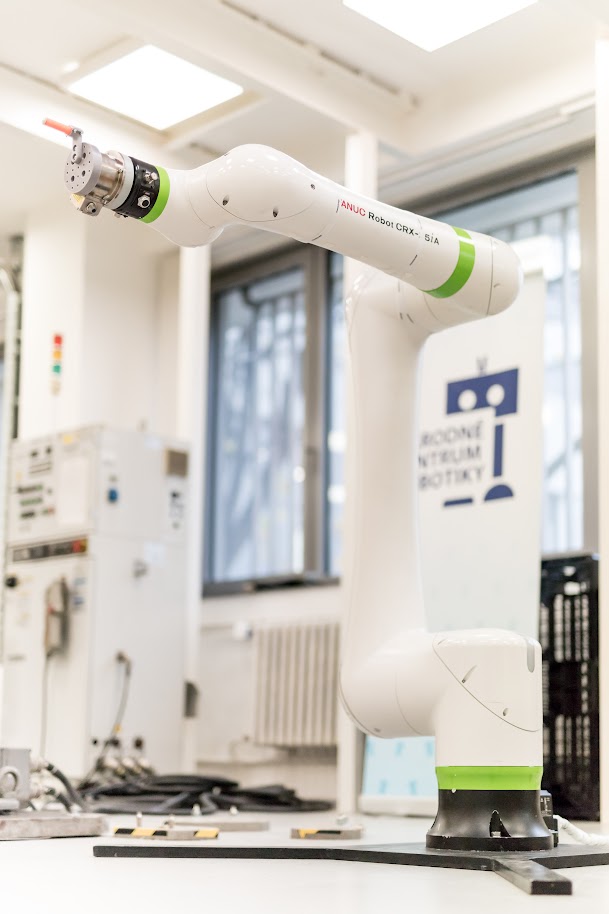
Silovo-poddajný robot FANUC CRX-25iA
6-osové robotické rameno schopné spolupráce s človekom v jednom zdieľanom priestore zapožičané spoločnosťou VÚEZ a.s.
výskumné úlohy: automatizovaná ultrazvuková defektoskopia, riadenie sily vo všetkých kĺboch, riadenie sily v 6 DOF cez snímač sily a momentu FTN-Gamma SI-130-10 a ultrazvuková sonda od firmy ATG

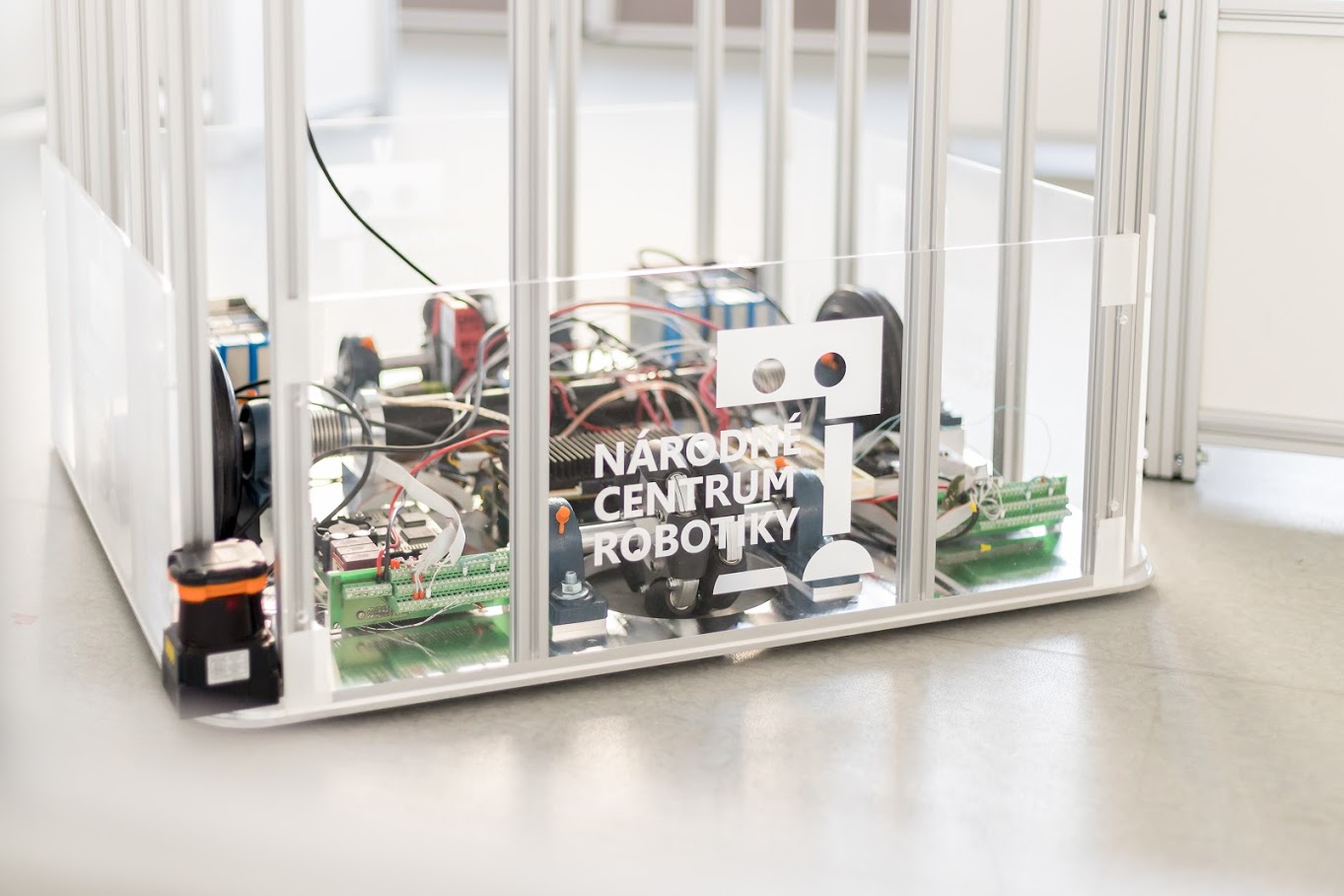
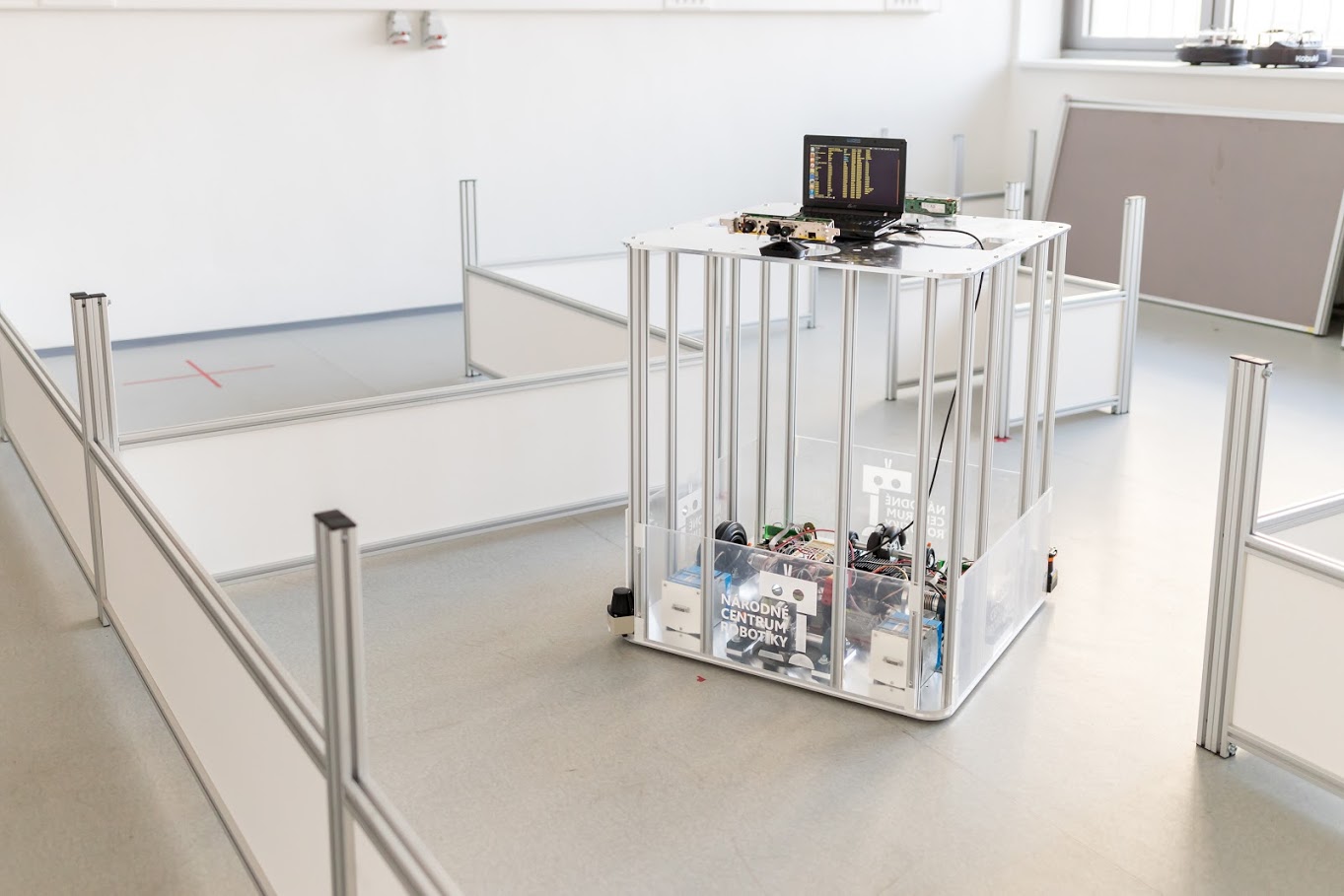
Servisný robot MRVK
prototyp slovenského servisného robota vytvoreného v spolupráci s firmou ZŤS VVÚ Košice
výskumné úlohy: mobilná manipulácia, senzorické systémy, manipulátor KV-01, riadenie v ROS

Mobilný manipulátor Kuka YouBot
robotické zariadenie na všesmerovom podvozku zapožičané firmou Matador Industries
výskumné úlohy: mobilná manipulácia, riadenie v ROS, teleoperačné riadenie


Servisný robot Black Metal
prototyp servisného robota pre vnútorné priestory vytvorený v spolupráci s firmou ATEC s.r.o.
výskumné úlohy: SLAM, obchádzanie pohyblivých prekážok, riadenie v ROS
Servisný robot Rover
prototyp servisného robota pre prieskum vesmírnych telies
výskumné úlohy: autonómne riadenie, testovanie tvorby stavebných materiálov pomocou solárnej 3D tlače

Kráčajúci robot Bioloid GP
kráčajúci robot bipedalového typu
výskumné úlohy: analýza chôdze a pohybu humanoidného robota

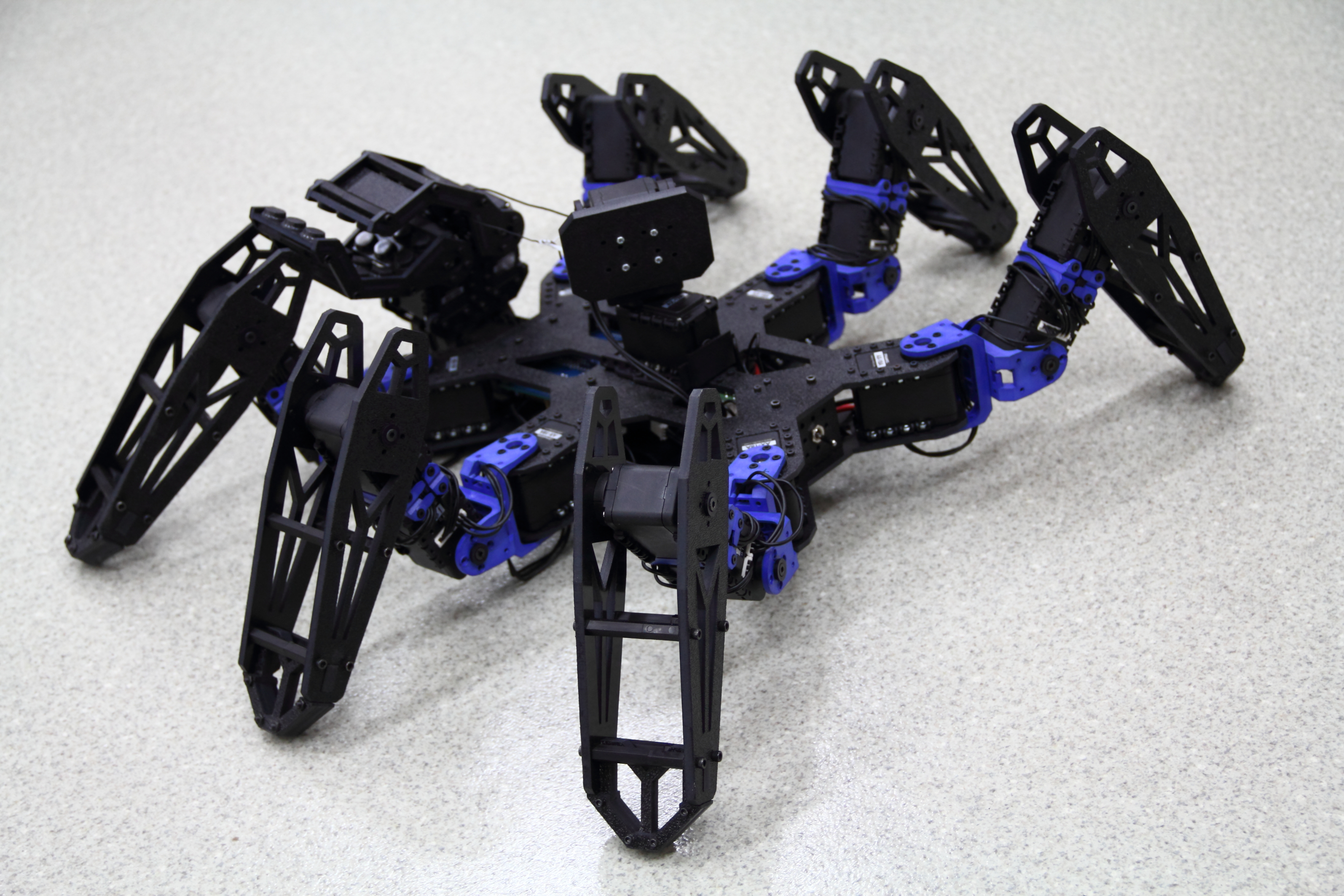
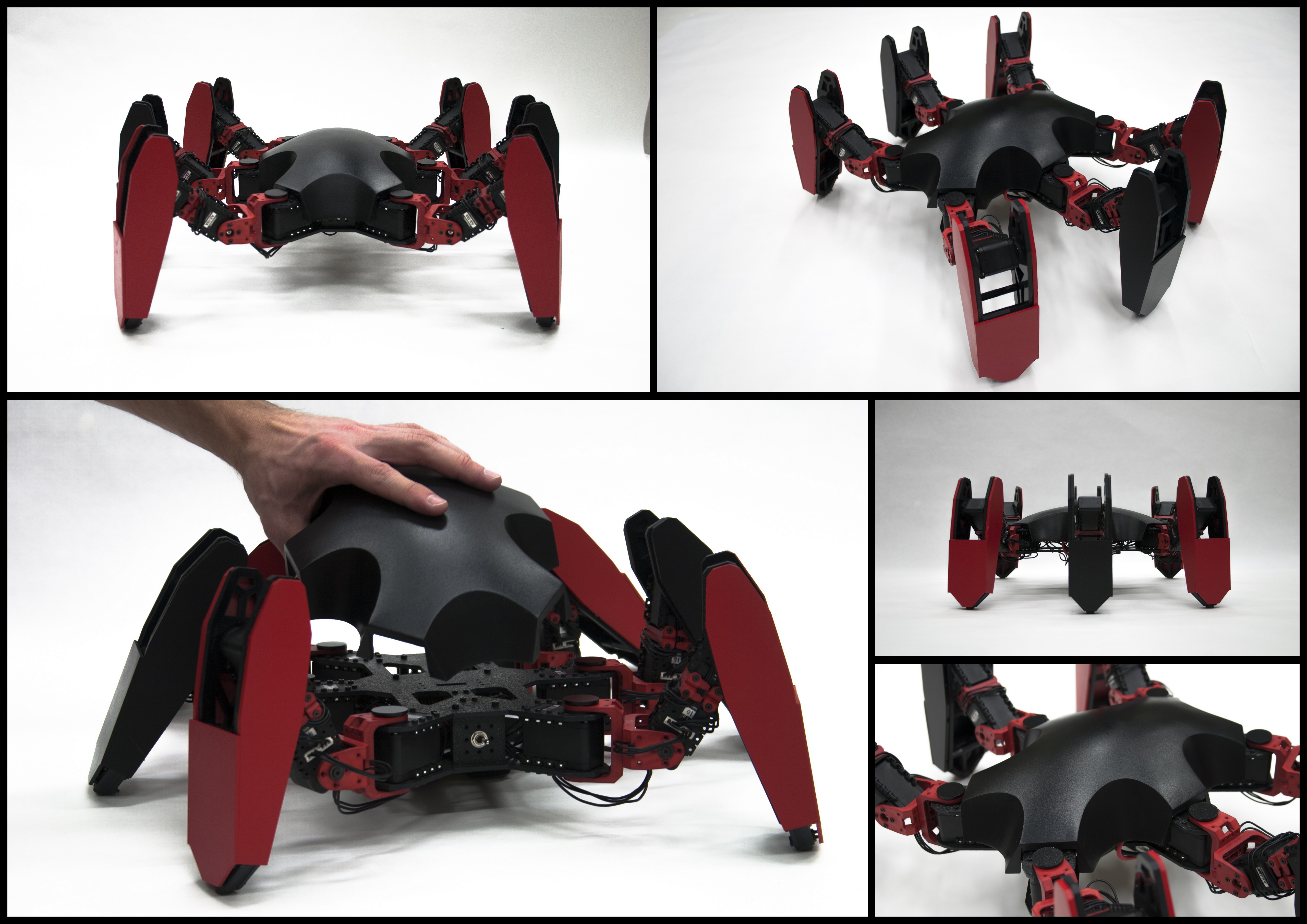
Kráčajúci robot Hexapod
kráčajúci robot so šiestimi nohami
výskumné úlohy: analýza chôdze, spoľahlivosť komunikácie
Humanoidný robot NAO
dvojnohý humanoidný robot schopný uchopenia jednoduchých predmetov
výskumné úlohy: adaptívna chôdza, spracovanie obrazu, HRI


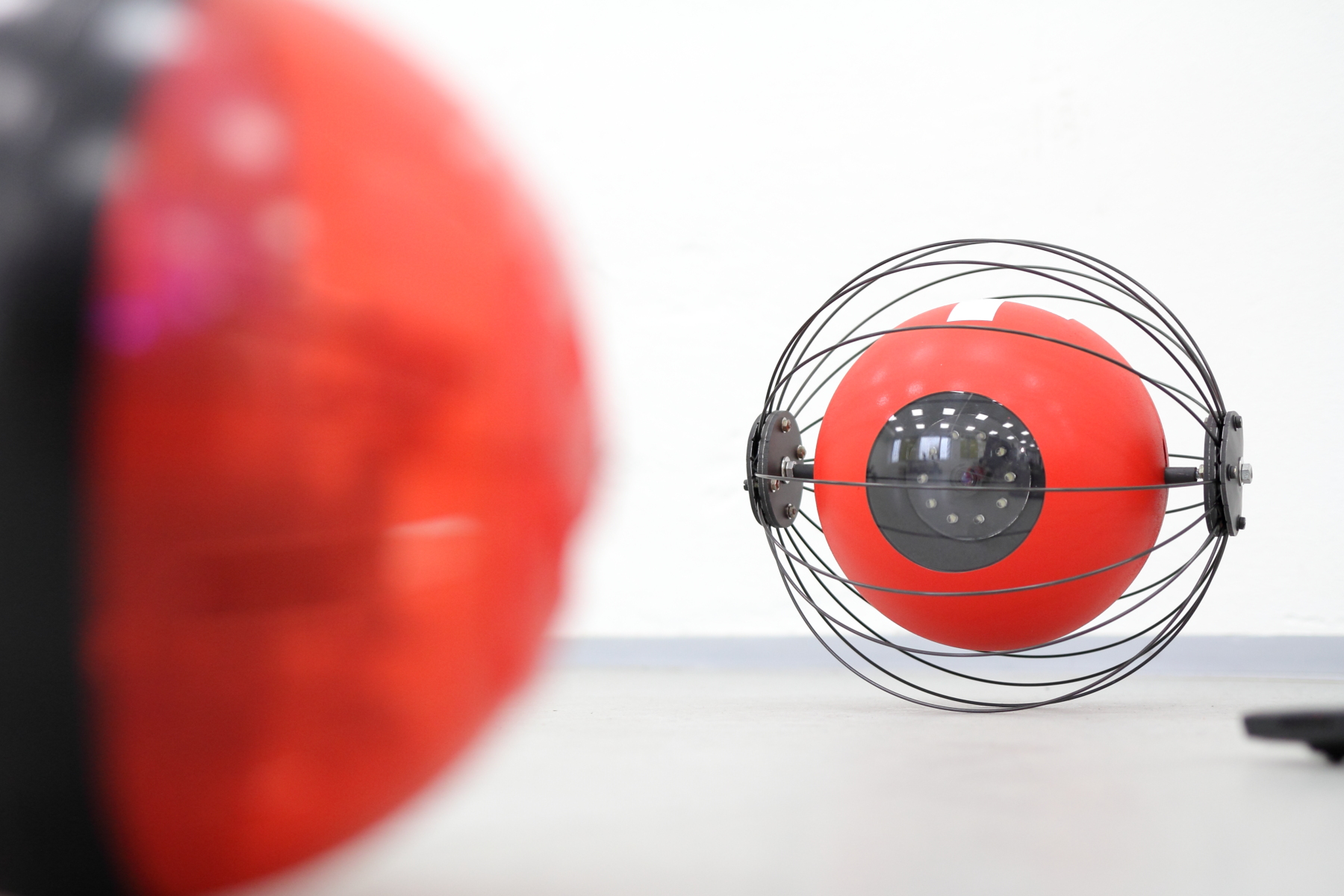
Robot Guľko
prototyp slovenského sférického robota vo viacerých verziách
výskumné úlohy: atypické mechatronické koncepty

Robotické drony
rôzne typy lietajúcich robotov (DJI F440 quadrocopter, DJI F550 hexacopter, DJI F450 quadrocopter, Yuneec Typhoon H Advance)
výskumné úlohy: vlastné inovatívne riadenie, lokalizácia a navigácia v 6 DOF


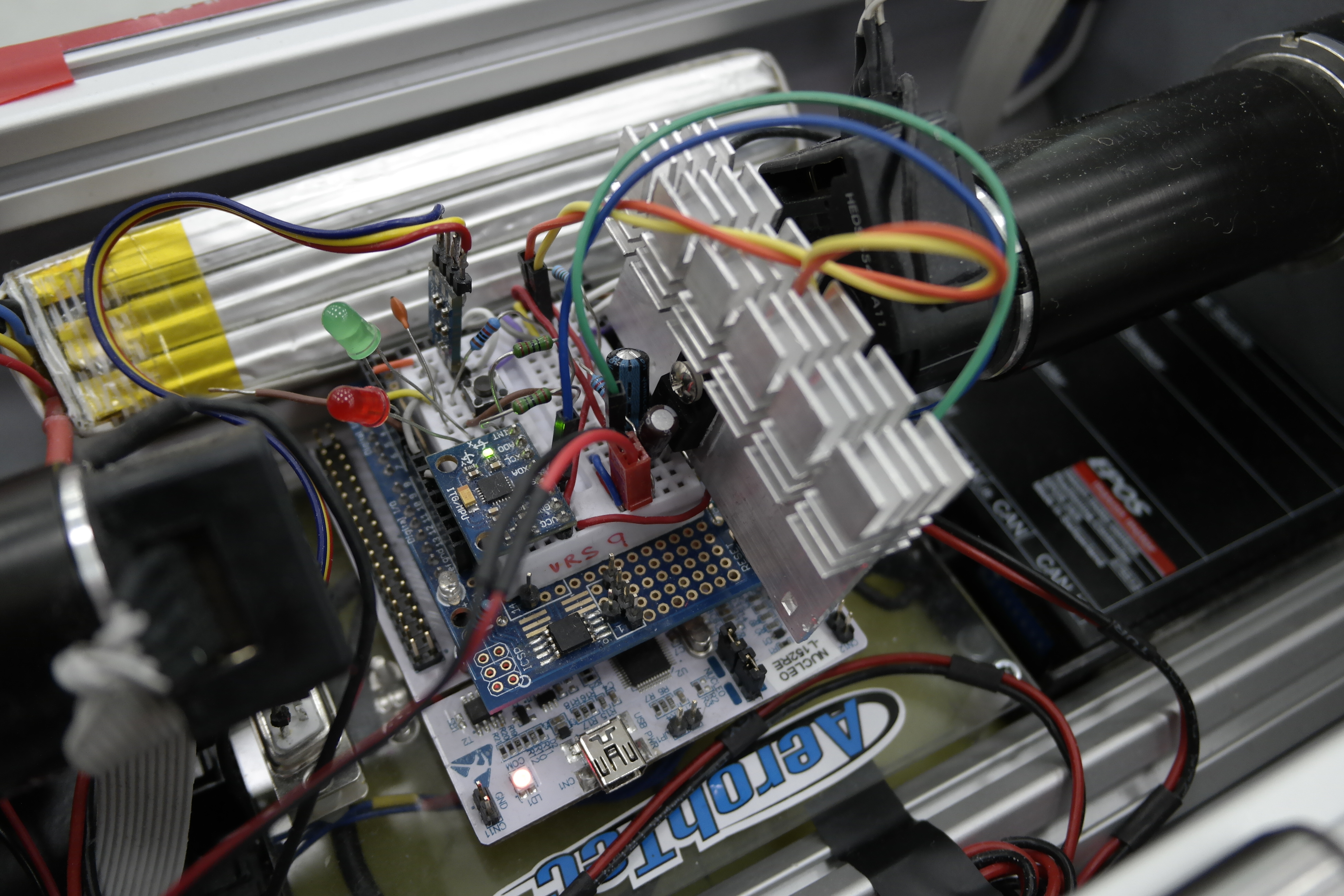
Robot typu segway
prototyp slovenského robota typu segway-dicykel
výskumné úlohy: IMU jednotka vlastného dizajnu, inovatívne filtre pre fúziu údajov

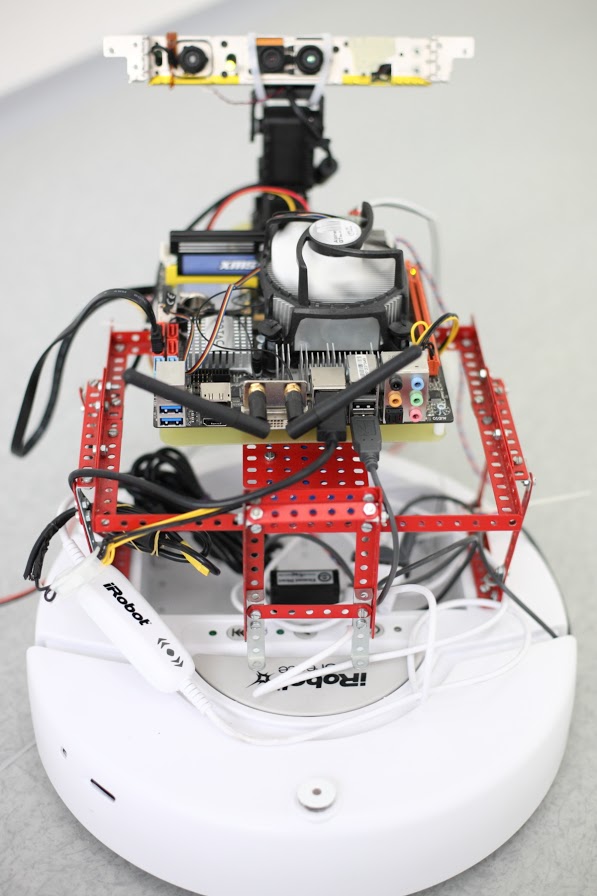
iRobot Create
9 kusov vývojového kitu pre rôzne účely
výskumné úlohy: riadenie pomocou gest, RGB-D navigácia a mapovanie, multiagentové mapovanie priestoru

Kobuki
5 kusov vývojového kitu pre rôzne účely
výskumné úlohy: SLAM, navigácia, RGB-D mapy


CNC frézy
frézy Kompas F1100 a na zákazku upravená F600
výskumné úlohy: podpora pri protoypovaní


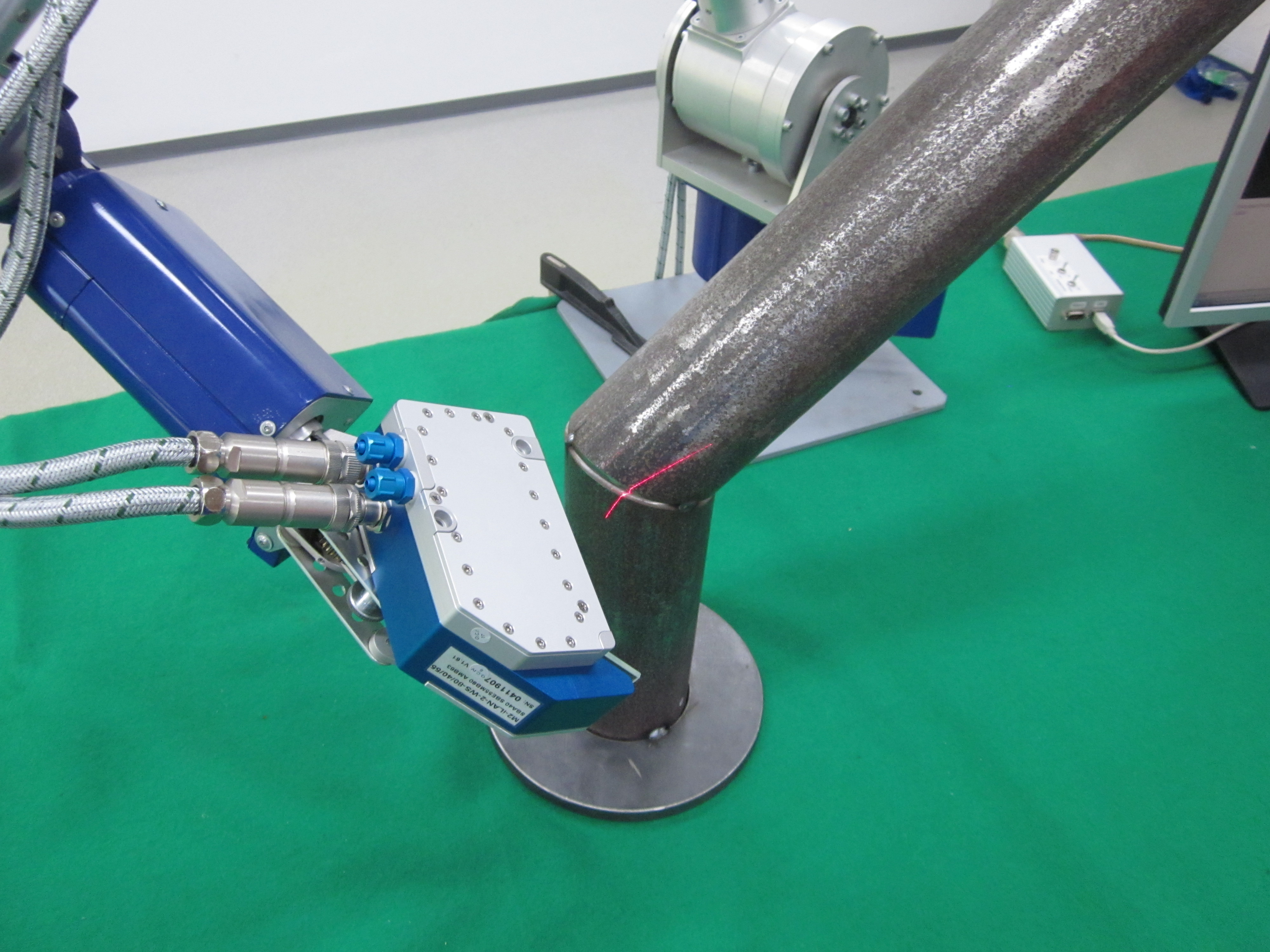
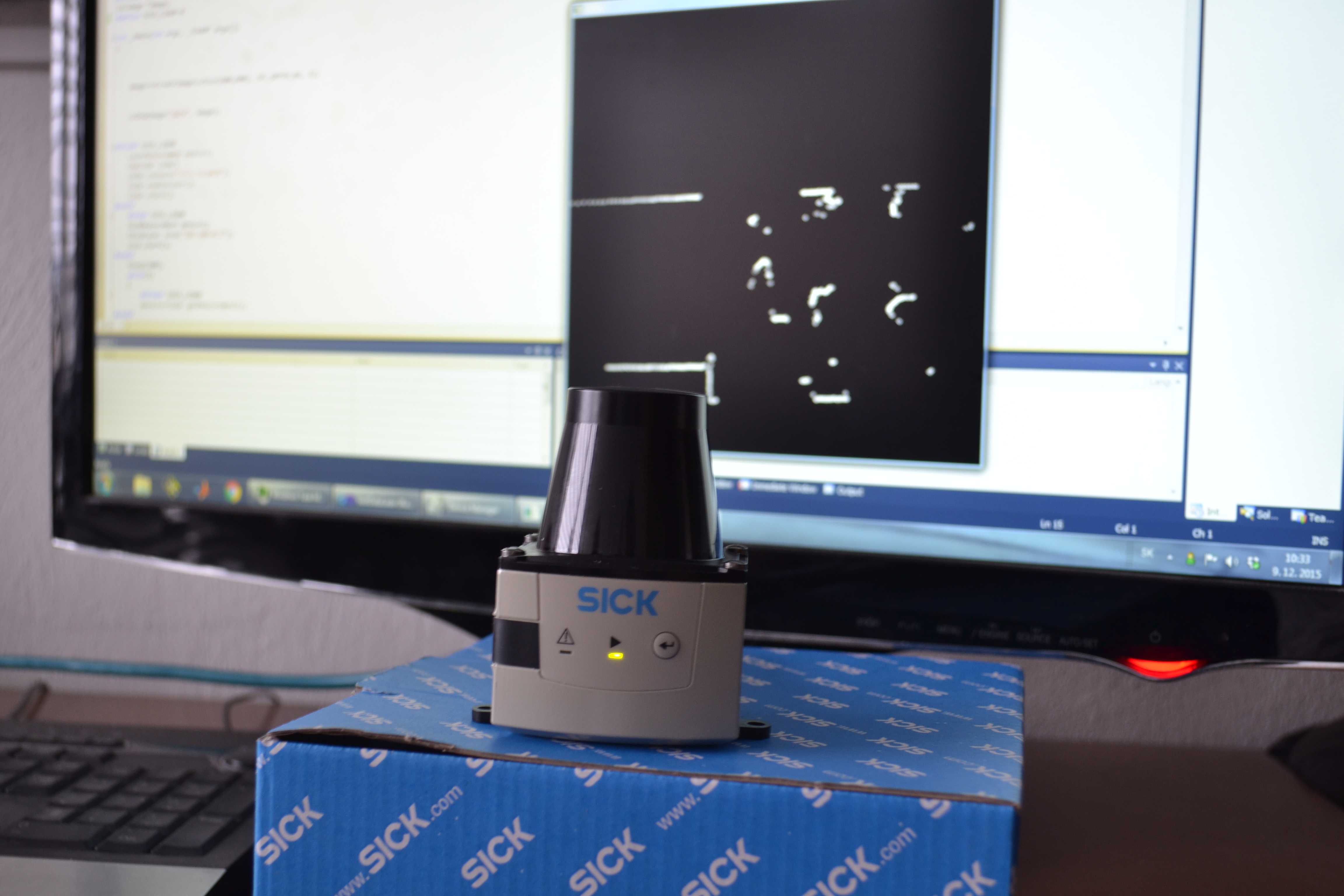
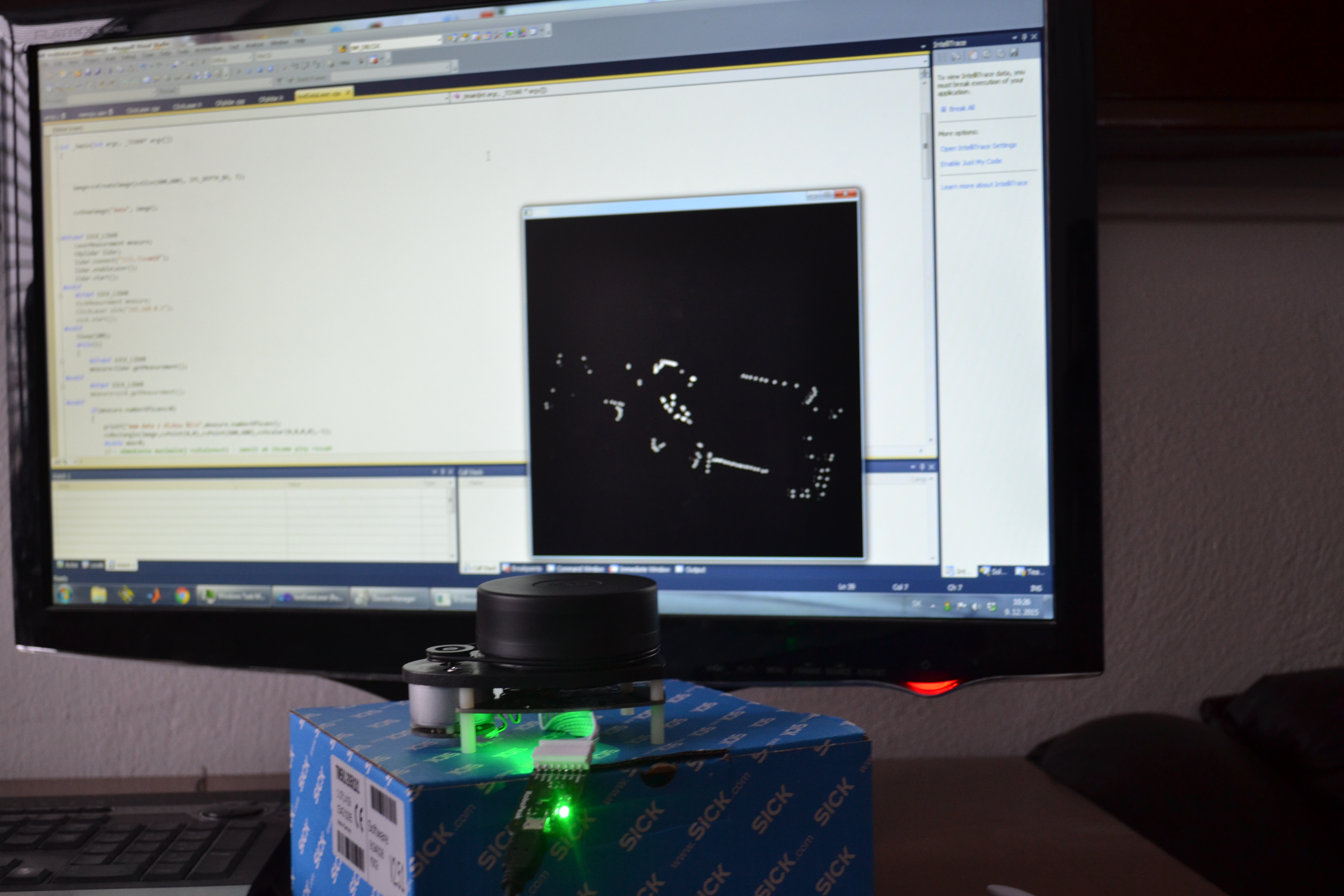
Laserové diaľkomery
rôzne typy laserových diaľkomerov typu SICK, Hokuyo, M2-iLAN-2, RPLIDAR
výskumné úlohy: automatizované zváranie, SLAM, detekcia pohybu, navigácia v priestore

Silovo-momentové snímače
rôzne typy silovo-momentových snímačov, napr. OptoForce HEX-70-CE-2000N
výskumné úlohy: silovo-momentové riadenie v 6DOF, automatizovaná montáž


Vizuálne systémy
kamery Ximea MC050CG-SY-UB, Kinect Azure, Kinect v2, Intel RealSense D435
výskumné úlohy: algoritmy mapovania, priechodnosti terénom a navigácie, HRI, detekcia operátora, detekcia gest, biometria, riadenie robota pomocou gest, detekcia objektov




Iné snímače
geodetický lokalizačný systém LEICA 1200+, NovAtel ProPak 6
špecifické vizuálne systémy (infračervená kamera TIM 160, HDR kamera uEye, stereopár, a pod.)
IMU jednotky (MEMS ADIS 16488BMLZ, ADIS 16350AMLZ)


NCR je konzorčným partnerom projektu: Expanding Digitalisation of Industry (4.0) in Slovakia – EXPANDI 4.0
Projekt EXPANDI 4.0 je financovaný z prostriedkov programu Digitálna Európa a Plánu obnovy a odolnosti SR.